Из-за ограниченной емкости батареии беспилотные вертолеты имеют небольшое полетное время, но после посадки они могут работать в течение нескольких часов или даже дней. Выбор необходимого места и точная посадка достаточно сложны для беспилотника. Добавление возможности взбираться по вертикальной плоскости позволяет неудачно приземлившемуся дрону выправить свое положение, при условии, что погода не слишком ветренная.
В стенфордской Лаборатории бионики и гибкого манипулирования смогли объединить в новом роботе способности посадки и перемещения по стенке в неблагоприятных погодных условиях. В результате был создан робот, получивший название SCAMP, как аббревиатура от Stanford Climbing and Aerial Maneuvering Platform.
SCAMP – первый робот, совместивший возможности полета и посадки с пассивной технологией закрепления и восхождения по вертикальной поверхности. А сорвавшись со стены, он снова переходит в режим полета.
Восхождение по стенам

В течение десяти лет была создана целая серия карабкающихся по стенам роботов, которые используют направленную адгезию для надежного сцепления и восхождения. Ранее микрошипы (закаленные стальные заусенцы, установленные на эластичных подвесках) и оригинальный клей позволяли роботам Spinybot и RiSE подниматься на шероховатых поверхностях. Затем был разработан новый клей, который позволил перемещаться по стеклу роботам StickyBot I, II и III. В процессе дальнейшего совершенствования сцепления и методики перемещения был создан миниатюрный 9-граммовый робот StickyBot, способный тянуть по стене груз, в 100 раз превосходяций вес робота. Это стало возможным благодаря компактному и в тоже время мощному сервоприводу, а также перераспределению нагрузки между двумя ногами, которые перемещаются по простым, линейным траекториям.
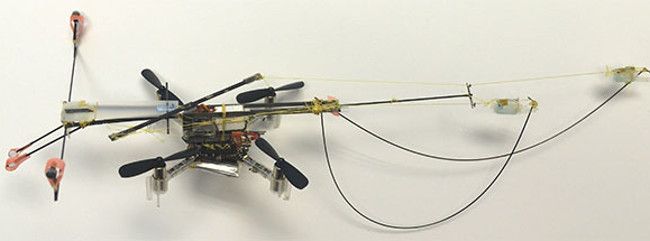
Конечный результат представляет собой механизм, который использует один сервопривод с высоким крутящим моментом для привода длинных шагов вверх по стене и один меньший сервопривод для перемещения по стене вперед и в сторону. Два сервопривода, в сочетании с рамой из углеродного волокна и шипованными ногами весят всего 11 граммов. По сути дела, был взят модифицированный вариант 9-граммового робота для перемещения по стенке, дополненный ногами с микрошипами и соединенный с крошечным квадрокоптером.
Полет и посадка
Хороший механизм для ползания по стенке не оптимален для посадки, поэтому пришлось пересмотреть использованный ранее метод сцепления со стеной. Используемые прежде беспилотные самолеты и вертолеты не позволяли обеспечить мягкую посадку и требовали проектировать подвеску, амортизирующую удар при приземлении и, в случае вертолета, использовать обратное вращение винта. Птицы для этого используют аэродинамические силы на протяжении всего процесса посадки, и этот подход был использован в SCAMP.
Механизм восхождения SCAMP был размещен наверху аппарата так, чтобы вращающиеся винты могли активно прижимать робота к стене. На длинном хвосте, используемом в качестве точки опоры при касании стены, размещен механизм, который позволяет прижимать аппарат к стене с помощью аэродинамических сил.
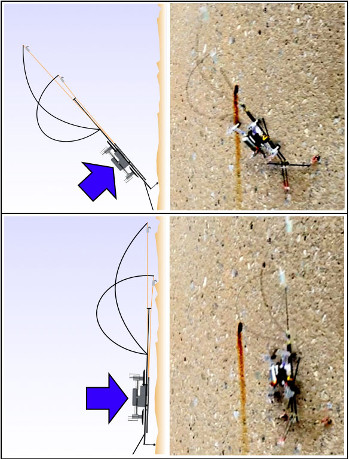
При посадке на стену SCAMP движется хвостом вперед, пока не обнаружит ее с помощью бортовых акселерометров. Затем тяга ротора вначале увеличивается до максимума, а в конечном итоге снижается. Вращающиеся винты помогают надежно зафиксировать сцепление со стенкой. После того как начинают работать микрошипы, можно отключить вращение винтов и начать восхождение.
Представляющиеся для карабкающегося SCAMP мертвым грузом винты могут очень пригодиться. Когда SCAMP начинает падать, что отмечается по внезапному вертикальному ускорению, он быстро включает винты. Это действие толкает его обратно на стену, чтобы он мог возобновить восхождение.
Винты также могут быть использованы, чтобы помочь микрошипам зацепиться на стенке. Одна из основных проблем при восхождении по вертикальной поверхности в том, что центр масс робота неизбежно висит в стороне от стены, а это значит, что ноги робота должны обеспечить некоторое усилие сцепления, чтобы сохранять устойчивость при перемещении. Кроме того, включая винты, SCAMP может компенсировать аэродинамически этот обратный момент при ходьбе, что значительно облегчает работу ног. Аналогии подобного поведения можно найти и в живой природе. Белки-летяги и дятлы чередуют полет, посадку и разные методы перемещения по древесной коре.
Полет в настоящее время является более энергоэффективным способом передвижения для SCAMP, чем восхождение.
Дальнейшие усовершенствования: адаптивное перемещение, создание семейства SCAMP
Есть еще целый ряд нереализованных задумок. Например, можно перестраивать перемещение, используя два сервопривода, чтобы подстраиваться под шероховатые и скользкие поверхности. Для скользкой поверхности надежнее использовать более короткую длину шага. Для относительно ровных поверхностей с ямками, широкий шаг максимизирует шансы найти хорошее сцепление с поверхностью, когда меньше точек опоры и они далеко друг от друга. В будущем предполагается реализовать адаптивное управление походкой, которое позволит роботу реагировать на неудачу, динамически меняя свою стратегию восхождения. Машинное обучение, а также верный алгоритм помогут создавать эффективные стратегии перемещения.
На основе SCAMP будет создаваться целое семейство роботов альпинистского типа, различного размера и типа перемещения. Полученный в ходе работы над SCAMP опыт позволит создать новые решения для перемещения по различным поверхностям, в новых средах, а также различные вертолетные платформы с новыми системами зондирования и коммуникации. В то же время, SCAMP будет продолжать делать все возможное, чтобы бросить вызов гравитации, перемещаясь вверх и не падая вниз.
Комментарии
(0) Добавить комментарий