Деформации позвоночника, такие как сколиоз и кифоз, характеризуются аномальной кривизной в позвоночнике. Детям с такими деформациями позвоночника, как правило, рекомендуется носить скобы, которые поддерживают туловище и бедра, чтобы исправить критическое отклонение.
Базовая технология крепления в целом не изменилась за последние 50 лет.
Эта медицинская технология может остановить/замедлить прогрессирование аномальной кривизны позвоночника у подростков, однако сегодняшние скобы накладывают ряд ограничений из-за их жесткой, статической и нечувствительной конструкции. Кроме того, пользователи находят их неудобными при использовании и могут страдать от натирания кожи, вызванного длительными, чрезмерными усилиями.
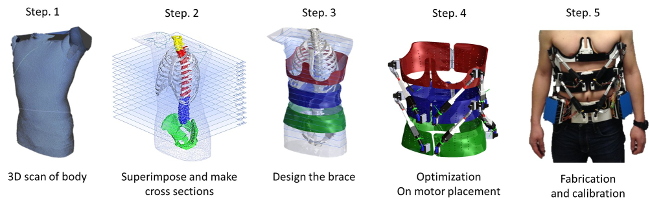
Для устранения этих недостатков исследователи из Columbia Engineering изобрели новый роботизированный экзоскелет позвоночника (Robotic Spine Exoskeleton - RoSE), который может устранить большинство из этих ограничений и привести к новым методам лечения деформации позвоночника. RoSE является динамическим креплением, что позволило команде провести первое исследование с измерением жесткости торса и охарактеризовать трехмерную жесткость человеческого туловища.
«RoSE является первым устройством для измерения и модулирования положения или силы во всех шести степенях свободы в конкретных областях туловища, - отмечают разработчики. - Это исследование является основополагающим, и мы считаем, что оно приведет к захватывающим достижениям как в характеристике, так и в лечении деформаций позвоночника».
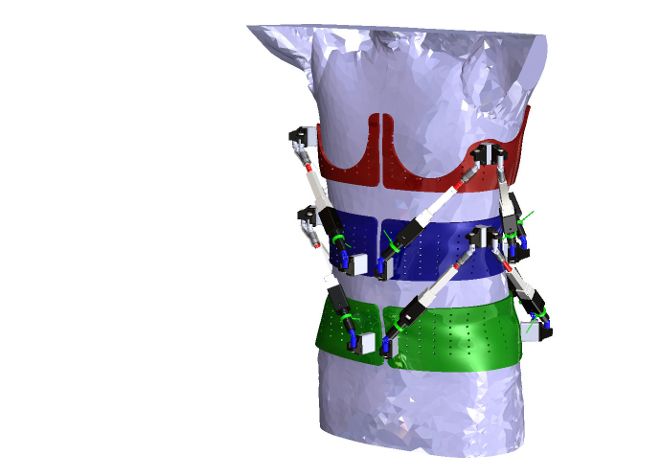
RoSE состоит из 3 колец, помещенных на таз, грудь и верхнюю часть позвоночника. Движение двух смежных колец контролируется роботом с параллельным приводом с шестью степенями свободы. В целом система имеет 12 степеней свободы и контролируется 12 двигателями. RoSE может контролировать движение верхних колец по отношению к кольцу таза или применять контролируемые усилия на этих кольца во время движения. Система может также применять корректирующие усилия в определенных направлениях, при этом обеспечивая свободное движение в других направлениях.
Восемь здоровых мужчин и двое мужчин с деформациями позвоночника участвовали в пилотном исследовании, которое было призвано охарактеризовать трехмерную жесткость их туловища. Полученные выводы могут привести к новым методам лечения деформации позвоночника с использованием динамической модуляции трехмерных сил.
Комментарии
(0) Добавить комментарий