Команда исследователей из Итальянского института технологий и Университета Пизы разработала антропоморфного робота, предназначенного для работы с использованием обычных инструментов, с целью использования его в поисковых и спасательных операциях, которые слишком рискованные для человека.
Робот Walk-Man предназначен для работы в поврежденных зданиях с выполнением таких задач, как разборка рухнувших кирпичных стен. Руководитель проекта Никос Tsagarakis сказал, что робот в виде человека может надежно захватить предназначенные для людей инструменты и войти в зоны или проходы, подходящие для человеческого тела.
«Когда вы создаете робота подобной формы, требуется меньшая адаптация его под условия окружающей среды для того, чтобы он мог использоваться в таком пространстве», - сказал Tsagarakis.
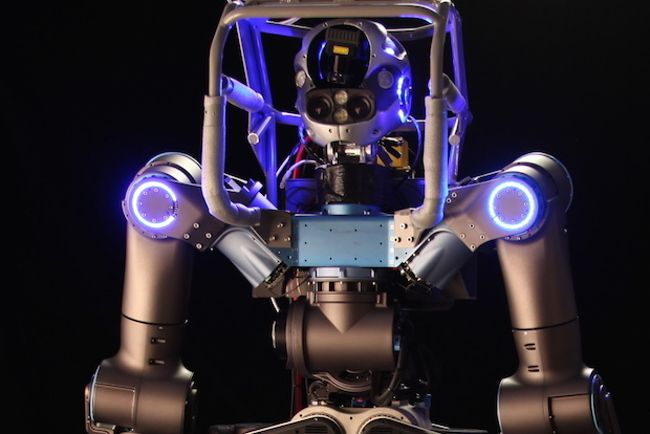
Робот Walk-Man дебютировал в финале конкурса DARPA Robotics Challenge в июне этого года. Его рост более 1,8 м, весит он 118 килограммов и имеет размах рук 2 метра. На голове установлена система стерео видения, а также вращающийся лазерный 3D-сканер для содействия в обследовании окружающей среды.
Робот предназначен для демонстрации баланса и передвижения, подобно человеку, он может перемещаться в сложных условиях, используя все свои конечности.
Tsagarakis рассматривает это как игру чейнджер в гуманоидной технологии, которая в настоящее время ограничивается использованием только нижней части тела для сохранения баланса. Он отметил, что верхняя часть тела также имеет решающее значение, особенно для прохождения через загроможденные пространства в структурной обстановке.
Исследователи в настоящее время разрабатывают алгоритмы для возможности ускоренной манипуляции, в сочетании с рефлексивным поведением, что позволит роботу преодолевать неровные участки пути и справиться с быстрым переходом от старта к остановке.
Предназначенный для автономной работы, робот-гуманоид будет управляться человеком дистанционно, особенно в случае решения сложной задачи. Робот будет передавать данные обратно к оператору, который, в свою очередь будет принимать решение о следующем движении робота.
Однако, скорость на самом деле не основная задача для Walk-Man. Tsagarakis объяснил, что медленные движения лучше в структурной обстановке для того, чтобы уменьшить вероятность столновений роботов с окружающими объектами, когда роботы будут двигаться, например, в местах стихийных бедствий. «И чем быстрее вы двигаетесь, тем сильнее будет воздействие силы», - добавил он.
Такая роботизированная технология рассматривается как шаг вперед, в сравнении с используемыми сегодня колесными роботами и моделями в форме животных. Предполагается, что им будет легче интегрироваться в общество.
Комментарии
(1) Добавить комментарий