
Роботы сегодня широко применяются в автомобилестроении, но они до сих пор имеют ограниченное использование при сборке авиалайнеров, где человеческие руки по-прежнему необходимы. Чтобы дать новый импульс в создании манипуляторов, Joint Robotics Laboratory (JRL) и Airbus Group приступили к работе по 4-летнему совместному исследовательскому проекту с разработкой человекоподобных роботов, которые могут работать на авиационных конвейерах.
В основном авиалайнеры собираются на конвейерной линии, но для обеспечения экономичности процесса необходимо шире использовать методики сборочной линии, включая роботов. Ситуация связана с тем, что авиалайнеры являются одним из самых передовых и сложных видов техники, а за один производственный цикл собирается меньше самолетов, чем выходит автомобилей с конвейера автозавода всего за один день.
Это одна из причин, почему процесс сборки самолетов не подходит для использования стационарно закрепленных роботов или даже обладающих ограниченной подвижностью на гусеничном или на колесном ходу. Другой причиной является то, что у авиалайнеров обширная внутренняя полость со сложным доступом в отдельные места. Из-за этого руководства по монтажу и сервисному обслуживанию содержат подробные иллюстрированные инструкции о том, как добраться до определенных частей самолета. Компании даже набирают персонал небольших габаритов, чтобы они могли поместиться в труднодоступных местах, таких как крылья. Поэтому не удивительно, что роботизация операций здесь связана с определенными трудностями.
В действительности, JRL сотрудничает с Национальным институтом передовой промышленной науки и технологий (AIST, Япония) и Национальным центром научных исследований Франции (CNRS). JRL сегодня работает над созданием роботов, способных работать вместе с людьми в очень неудобной для роботов среде, где им приходится выполнять сложные и опасные работы, освобождая персонал для решения задач более высокого уровня.
Для выполнения необходимой работы роботы должны иметь способность передвигаться в труднодоступных местах, часто с неровными поверхностями, не натыкаясь на окружающие предметы. Выбрав позицию, они должны закручивать и затягивать болты, очищать поверхность от металлической пыли и соединять отдельные части, а затем убеждаться, что задача выполнена правильно.
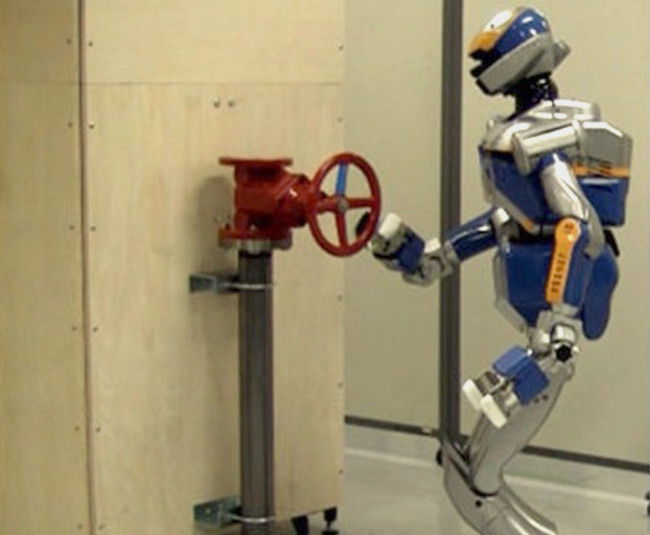
Согласно JRL, гуманоидная форма робота позволяет выполнять больше задач и особенно хорошо подходит для работы на воздушных судах, корпуса которых специально спроектированы для работы в них людей. Используя роботов HRP-2 и HRP-4, команда специалистов работает над созданием не только шагающих роботов, но также и тех, что смогут передвигаться ползком в ограниченном пространстве, стоять на четвереньках или лазить по лестницам и ступенькам.
Чтобы добиться этого JRL и ее партнеры создали новые алгоритмы, которые позволяют выполнять сложные вычисления, необходимые для перемещения внутри воздушного судна в процессе сборки, а затем, выполняя задание, модифицировать поведение, чтобы учесть непредусмотренные события, такие как неожиданное препятствие. Они должны действовать достаточно быстро, чтобы работать в режиме реального времени, особенно если робот работает совместно с человеком.
JRL заявляет о том, что учитывая долгосрочные перспективы человекоподобных роботов (10 или 15 лет), они не только предвосхищают достижения в робототехнике, но и ориентируются на использование роботов в самолетах, вертолетах и космических аппаратах.
Роботы должны перемещаться в узком пространстве и выполнять сложные задачи из различных позиций. Одним словом, производителю необходимы человекоподобные роботы, которые могут имитировать движения человека, такие как встать на колени или наклониться и способные выполнять такие более сложные функции, как привинчивание или затягивание.
Комментарии
(0) Добавить комментарий