Исследователи из Zhejiang Sci-Tech University и University of Essex разработали робота, вдохновленного раками-богомолами, который может помочь в исследовании и мониторинге подводных пространств.
"Многие подводные среды имеют узкие пространства, труднодоступные для человека, поэтому было бы оптимально, если бы их исследованием занимались роботы, - говорит один из авторов статьи Ган Чен. - Рак-богомол гибкий и быстро плавающий мелкий хищник в морской среде, и ее отличная способность к движению может дать новые исследовательские идеи для разработки подводных роботов".
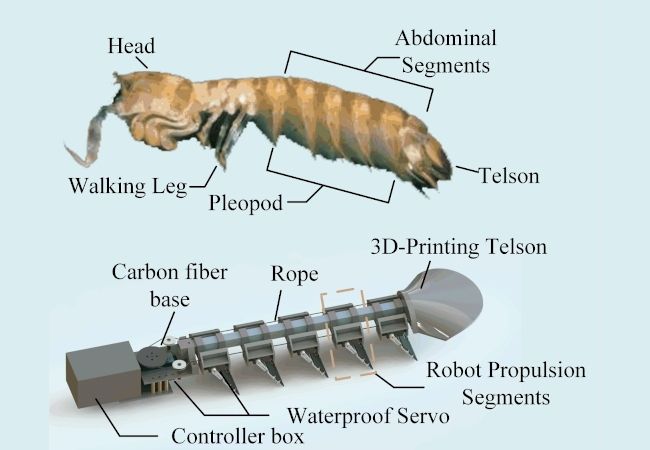
Вдохновившись этим ракообразным Чен и его коллеги задались целью искусственно воспроизвести его. Созданный маневренный робот состоит из 10 искусственных плеопод и гибкого тела.
"Бионический робот приводится в движение пятью парами плеопод, - пояснил Чен. - Баланс скорости и устойчивости может быть достигнут путем регулировки частоты, амплитуды и разности фаз движения этих пяти пар плеопод. Кроме того, соединение каждой пары плеопод является независимым, что очень удобно для ремонта в случае структурных повреждений под водой".
Управление движениями робота осуществляется за счет изгиба гибкого туловища с помощью троса, а также за счет движения искусственных плеопод. В совокупности эти механизмы позволяют роботу быстро изменять угол поворота, чтобы плыть в нужном направлении.
"Несколько плеопод являются резервными, что позволяет роботу осуществлять поворот даже при отказе некоторых плеопод, - говорит Чен. - Бионический плеопод имеет три шарнира, один из которых является активным, приводимым в движение сервоприводом, а два остальных - пассивными, использующими сопротивление воды".
По сути, когда одна из конечностей робота движется назад, три ее сустава полностью раскрываются, что приводит к максимальной тяге. И наоборот, когда конечность возвращается в исходное положение, суставы складываются, уменьшая сопротивление движению. Такая уникальная конструкция позволяет использовать особенности течения воды для упрощения конструкции робота, увеличения его движущей силы и облегчения управления им под водой.
Исследователи протестировали прототип робота и обнаружили, что он хорошо передвигается под водой, развивая максимальную скорость 0,28 м/с и имеет минимальный радиус разворота 36 см. Отмечается, что скорость и движения робота легко и точно контролируются, что снижает риск столкновения с подводными препятствиями.
"В будущем мы сосредоточимся на том, как реализовать автономное перемещение бионического робота в узкой подводной среде, - говорит Чен. - Мы планируем оптимизировать конструкцию, форму и дизайн аппаратной системы робота, чтобы улучшить его способность к движению в трехмерном пространстве с шестью степенями свободы и повысить скорость движения под водой. Затем будет увеличено количество IMU, камер, датчиков глубины и других устройств сбора информации, что позволит добиться более точного управления движением робота".
На данный момент робот находится на ранней стадии разработки. Статья "Design and Control of a Novel Bionic Mantis Shrimp Robot" была опубликована в журнале IEEE/ASME Transactions on Mechatronics.
Комментарии
(0) Добавить комментарий