Одним из наиболее распространенных вариантов использования миниатюрных роботов является поиск выживших в завалах на месте катастрофы. Робот CLARI, созданный по образу насекомых, может оказаться полезен в этом сценарии, поскольку он может сделать себя тоньше, чтобы протиснуться через узкие горизонтальные щели.
Робот CLARI (Compliant Legged Articulated Robotic Insect) был создан в University of Colorado-Boulder (CU Boulder) командой под руководством докторанта инженерных наук Хейко Кабутца. Он сотрудничал с доцентом университета Каушиком Джаярамом, который ранее создал робота, вдохновленного тараканами, который сплющивает себя, чтобы протиснуться через вертикальные щели.
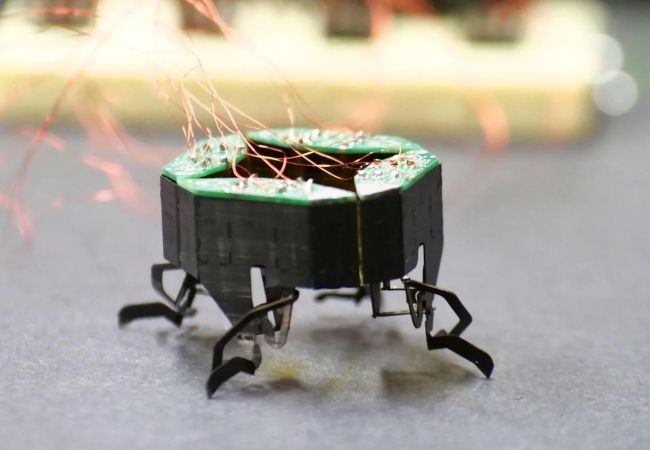
Четырехногий робот CLARI имеет условно квадратную форму, если смотреть на него сверху, и состоит из четырех секций, соединенных между собой гибкой внешней оболочкой. Каждая секция включает в себя одну ногу со своей схемой и двумя приводами, которые перемещают ногу вперед и назад, а также из стороны в сторону. Таким образом, каждая нога может работать независимо от других.
При движении по открытой местности CLARI по умолчанию сохраняет квадратную форму, что обеспечивает оптимальную скорость и устойчивость. Однако если робот встречает препятствие он может перестроиться в более длинную и узкую форму. Если говорить о конкретных цифрах, то ширина робота уменьшается с 34 мм до 21 мм.
Хотя нынешняя итерация CLARI подключена к источнику питания и управления, есть надежда, что его будущие версии будут питаться от батарей и оснащены датчиками для автономного перемещения в сложных условиях. Ученые также хотят сделать этих роботов более компактными, но при этом оснастить их большим количеством ног для повышения маневренности.
"Когда мы пытаемся поймать насекомое, оно может исчезнуть в щели, - говорит Кабуц. - Но если у нас есть роботы с возможностями паука или мухи, мы можем добавить камеры или датчики, и теперь мы можем начать исследовать пространства, в которые раньше не могли попасть".
Работа "Design of CLARI: A Miniature Modular Origami Passive Shape-Morphing Robot" была опубликована в журнале Advanced Intelligent Systems.
Комментарии
(1) Добавить комментарий