Использующие протезы вместо ампутированных ног люди часто падают, споткнувшись или наткнувшись на что-либо. Однако разрабатываемый в Университете Карнеги-Меллона роботизированный протез ноги обещает помочь пользователям восстанавливать баланс с помощью методов, основанных на действиях ноги человека.
Доцент робототехники Хартмут Гейер сказал, что стратегия управления, разработанная на основе изучения человеческих рефлексов и других нервно-мышечных систем управления, хорошо себя зарекомендовала в ходе моделирования и лабораторных испытаний, обеспечивая равновесие во время ходьбы по неровной поверхности и лучшее удержание баланса после спотыкания и толчков. Эта технология будет развиваться и испытываться с помощью добровольцев с ампутированными выше колена конечностями.
«Активные протезы могут позволить компенсировать недостающие мышцы ног, но если инвалиды боятся падения, они не будут использовать их», - сказал Гейер. «Сегодняшняя система протезирования пытается имитировать естественное движение ноги, но не может реагировать подобно ноге здорового человека в случае спотыкания, толчков или зацеплений. Наша работа основана на идее, что, если мы поймем, как человек контролирует свои конечности, то сможем использовать те же принципы для управления роботизированными конечностями».
Эти принципы могут помочь не только при создании протезов ног, но будут полезны и для шагающих роботов. Последние данные, применяющие схему нервно мышечного управления для протезов ног и в моделировании полноразмерных шагающих роботов, недавно были представлены на Международной конференции IEEE по интеллектуальным системам и роботам в Гамбурге, Германия. Предстоящий научный доклад «Исследования IEEE в биомедицинской инженерии» уделяет особое внимание тому, как эта схема управления может улучшить восстановление баланса.
Гейер изучал динамику ходьбы и контроля движения в течение прошедшего десятилетия. Среди его наблюдений роль мышц-разгибателей ног, которые, как правило, работают на выпрямление в суставах. Он говорит, что силовая обратная связь от этих мышц автоматически реагирует на неровности поверхности, быстро замедляется движение ноги или сокращает шаг, по мере необходимости.
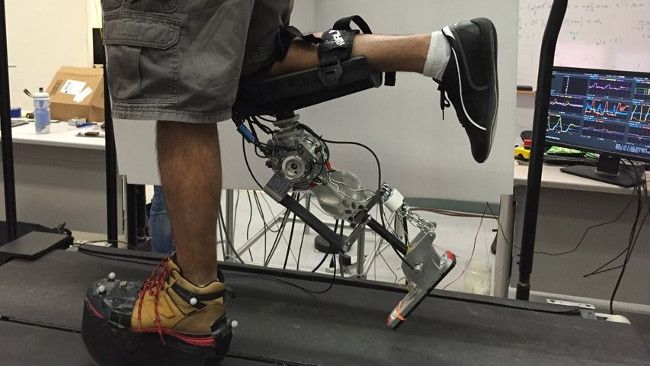
Команда Гейера оценила нервно-мышечную модель с помощью компьютерного моделирования и устройства с проводным управлением размером приблизительно в половину человеческой ноги, называемого «Роботизированная нейро-мышечная нога 2».
Исследователи обнаружили, что метод нервно-мышечного управления может воспроизводить обычную манеру ходьбы и эффективно реагирует на нарушения, когда нога начинает движение, а также в конце шага. Необходима дальнейшая работа, отметили они, поскольку схема управления пока не эффективно реагирует на нарушения в середине шага.
Активные протезы имеют двигатели, которыми можно отрегулировать угол коленного и голеностопного сустава при ходьбе, что обеспечивает более естественную походку. Эти двигатели также генерируют усилие, чтобы компенсировать недостающую силу мышц, что снижает физические нагрузки для инвалидов и позволяет им двигаться также быстро, как здоровый человек.
Более миллиона американцев пережили ампутацию ног и это число, как ожидается, вырастет в четыре раза к 2050 году, сказал Гейер. Около половины таких инвалидов опасаются падения и многие говорят о неспособности ходить по неровной местности, что ограничивает их возможности в жизни.
«Роботизированное протезирование является новым полем деятельности, обеспечивает возможности для решения этих проблем с новыми конструкциями протезов и систем управления», - сказал Гейер.
Комментарии
(0) Добавить комментарий