Автономные исследования и надежное картографирование новых районов – это сложная задача для мобильных роботизированных систем. Во многих ситуациях миссия дополнительно осложняется за счет недоступности GPS и ограниченной видимости. Разработчики предлагают новую двухуровневую парадигму оптимизации.
Сначала онлайн-алгоритм определяет конечную ветвь, позволяющую сократить площадь исследуемого участка. Путь к первой обзорной точке определяется на втором уровне планирования. Выбирается новый алгоритм, зависящий от положения робота – устройство проходит необходимый маршрут, выполняя поставленную задачу, и двухуровневый процесс повторяется снова.
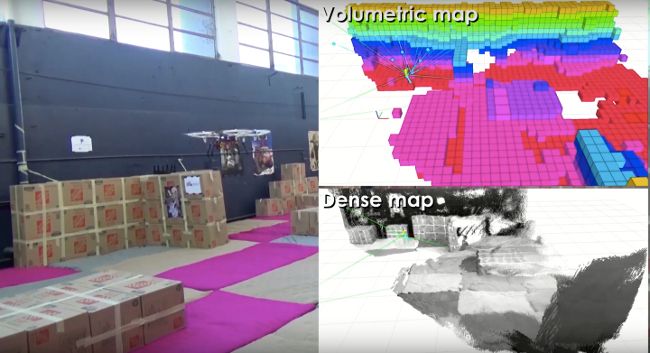
Алгоритм был проверен экспериментально на базе летательных аппаратов-роботов с системой стереовидения как в хорошо освещенных, так и в затемненных условиях – процесс запечатлен на видео. Для дальнейшего развития проекта исследователи опубликовали все необходимые данные в открытом доступе на сайте Github.
Комментарии
(0) Добавить комментарий