Исследователи Колумбийского университета решили давнюю проблему в создании мягких роботов, способных имитировать своими движениями природные биологические системы. Группа из лаборатории Creative Machines, возглавляемая профессором машиностроения Ходом Липсоном, разработала синтетическую мягкую мышцу.
Созданная с использованием 3D-печати, это единственная в своем роде искусственная активная ткань с внутренней способностью к расширению. Она не требует внешнего компрессора или высоковольтного оборудования, необходимого для прежних мышц. Новый материал имеет в 15 раз больше плотность деформации (расширение на грамм), чем естественная мышца, и может поднимать груз в 1000 раз больше собственного веса.
Существующие технологии мягких приводов обычно основаны на пневматическом или гидравлическом воздействии упругих оболочек, которые расширяются при подаче воздуха или жидкости. Требующиеся при этом внешние компрессоры и оборудование для регулирования давления не позволяют создавать миниатюрных роботов, которые могут автономно двигаться и работать.
«Мы преодолели одно из последних препятствий на пути к созданию реалистичных роботов», - сказал Ход Липсон.
Роботы из мягких материалов имеют большие перспективы там, где они должны контактировать и взаимодействовать с людьми, например, на производстве и в здравоохранении. В отличие от жестких роботов, мягкие устройства могут копировать такие естественные движения, как захват и манипуляция для оказания медицинской помощи, выполнение деликатных задач или поиск мягких объектов.
Для создания исполнительного механизма для большой нагрузки и усилия в сочетании с низкой плотностью мышцы ведущий автор исследования Аслан Мириев использовал матрицу из силиконового каучука с этанолом, распределенным повсеместно в микропузырьках. В этом решении сочетаются эластичные свойства и экстремальное изменение объема. Мышцы легко изготавливаются, они недорогие и сделаны из экологически безопасных материалов.
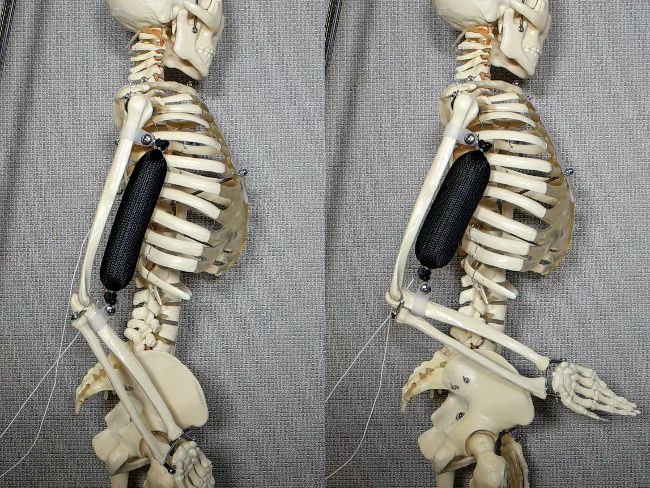
После 3D-печати искусственной мышцы желаемой формы ее приводили в действие электрическим методом, с использованием тонкого резистивного провода и маломощного источника напряжением 8 В. Материал был испытан со множеством роботизированных устройств и показал значительную способность к расширению и сжатию — до 900 % при электрическом нагревании до 80 ° C. С компьютерным управлением автономный блок способен выполнять задачи движения практически в любой конструкции.
Исследователи продолжат разработку, используя проводящие материалы для замены встроенного провода, ускоряя реакцию мышц. В дальнейшем они подключат искусственный интеллект для управления, что может стать последней вехой в стремлении копировать естественные движения.
Комментарии
(0) Добавить комментарий