Подобно роботу Беймаксу, герою полнометражного мультфильма «Город героев», в разработанном компанией Disney Research мягком роботе используются воздушные полости, чтобы смягчить столкновение и обеспечить обратную связь по давлению, необходимую для захвата нежных объектов.
Исследователи использовали пару созданных методом 3D-печати модулей из мягкого материала, чтобы успешно подбирать одноразовые пластиковые стаканчики, не повреждая их, рулон бумаги для принтера, кусочек мягкого сыра, не размяв его. Испытания на столкновение показали, что надувные модули уменьшили максимальную силу фронтальных ударов на 32-52%, а боковых ударов на 26-37%.
«Взаимодействующие с роботами в повседневной жизни люди – это уже не просто научная фантастика»,- сказал научный сотрудник Джоогаюнг Ким. «Создание их мягкими особенно важно для роботов, которые будут взаимодействовать с детьми, пожилыми людьми или с пациентами».
Ким и его коллеги из Disney Research представили свои выводы на Международной конференции по интеллектуальным роботам и системам (IROS 2015), которая открылась 28 сентября в Гамбурге, Германия.
Заполненные воздухом мягкие модули позволяют поглощать неожиданные удары. Отслеживая изменение давления, которое происходит, когда герметичная, но гибкая камера деформируется, она также может служить в качестве контактного датчика, обеспечивая обратную связь в процессе прикосновения, захватывания и манипулирования.
Исследователи создали мягкие цилиндрические модули с полушариями на торцах немного менее 12,5 см в длину и около 5 см в диаметре. В дополнение к заполненной воздухом внешней оболочке каждый модуль имеет жесткое соединение в центре. Модули, таким образом, могут использовать свойства различных материалов, как гибких, так и жестких.
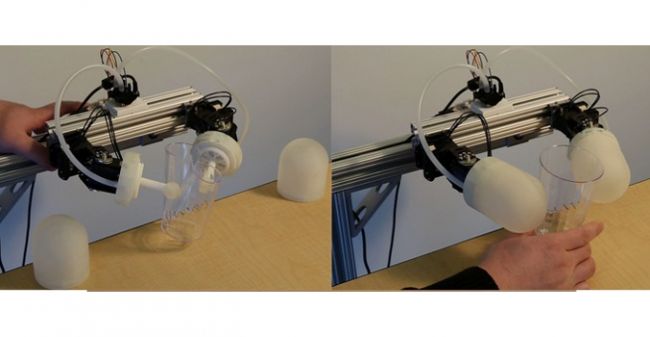
В экспериментах с использованием только жесткой связи, с удаленными наружными, мягкими покровами, исследователи смогли захватить одноразовый стаканчик. Но без обратной связи по давлению, обеспечиваемой мягкой оболочкой, стаканчик, в конечном счете, был смят. Используя мягкую оболочку, исследователи получают давление, достаточное для захвата и удерживания стаканчиков и других деликатных объектов, не повреждая их.
Подобная концепция может быть использована для производства модулей и с другой геометрической формой, отмечают авторы разработки.
Комментарии
(0) Добавить комментарий