Если вы смотрели военные или приключенческие фильмы, то должны быть знакомы с правилом «своих в беде не бросаем». Исследователи из Лаборатории биомиметических микросистем в Калифорнийском университете в г. Беркли выяснили способ создания роботов, которые действуют по этому же принципу, по крайней мере, в случае подъема по лестнице.
Оснастив маленьких, шустрых роботов магнитной присоской и буксировочным тросом, исследователи продемонстрировали новый для роботов способ взбираться по лестницам, которые имеют слишком высокие ступеньки, непреодолимые для одного VelociRoACH.
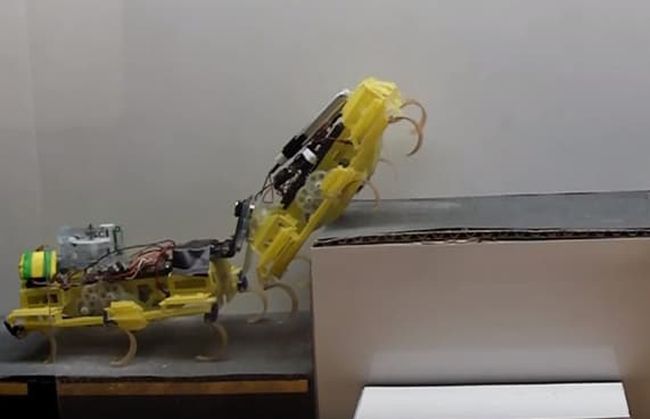
Следующий первым робот перемещается, как и следует таракану, по образу которого он сделан. На пути он встречает препятствие в виде ступеньки и, по существу, врезается в нее на полном ходу. После ряда безуспешных попыток, ему удается зацепиться передними лапами за верхнюю плоскость ступеньки, высота которой 6,5 сантиметров.
И тут на подмогу приходит его напарник.
Следующий сзади робот, в буквальном смысле, толкает вверх карабкающегося на ступеньку собрата. В то же время задний робот с помощью магнитной присоски цепляется к управляемому тросу на спине первого робота. За счет подталкивания переднему роботу удается выбраться наверх. После чего он движется вперед в поисках какого-либо упора, за который можно было бы уцепиться, чтобы вытащить наверх заднего робота, уже закрепленным на нем тросом. В процессе вытягивания наверх своего напарника, первый робот контролирует длину троса таким образом, чтобы обеспечить оптимальное провисание и натяжение.
Исследователи отмечают, что в последующем благодаря использованию дополнительных датчиков, например, для контроля разрыва магнитного соединения, можно будет повысить успешность совместного восхождения по ступенькам, которая при испытаниях равнялась только 50 процентам.
Конечно, это была не первая демонстрация робота VelociRoACH. Ранее исследователи использовали этого механического таракана в качестве разгонного блока для орнитоптера, а также разработали для робота специальную оболочку, которая помогает ему протискиваться в труднодоступных местах. Созданный по образу и подобию таракана робот шустро бегает по лабораториям уже с 2013 года.
Первый вариант VelociRoACH мог достигать скорости 2,7 метра в секунду. Это означает, что за одну секунду он предолевал расстояние, превышающее в 26 раз длину его корпуса. Вторая версия X2-VelociRoACH может развить еще более впечатляющую скорость 4,9 метра в секунду.
Комментарии
(0) Добавить комментарий