При проектировании конечностей для роботов разработчикам постоянно приходится решать противоречивые задачи – скорость перемещения зависит от веса, а точность и легкость управления вступают в противоречие с плавностью хода. Устранить некоторые из этих компромиссов обещает новая гибридная гидравлическая передача, разработанная в Disney Research из американского г. Питсбурга. Она позволяет делать для роботов достаточно легкие руки, чтобы они могли двигаться быстро, изящно и при этом достаточно точно.
Передача состоит из противодействующих цилиндров с гофрированной мембраной, подобных традиционным гидравлическим цилиндрам, но закрытых резиновой мембраной вместо скользящих уплотнений. В результате, механическая система может эффективно, с небольшим трением передавать энергию. В новинке применен ряд простых и оригинальных решений для управляемой передачи механической энергии.
Контролируемое распределение усилий позволяет инженерам проектировать упругие и податливые конечности, которые обеспечат новые возможности для роботов, создаваемых для дома, производства или развлекательных заведений, которые обеспечат прямое взаимодействие между людьми и роботами.
"Мы объединили лучшие элементы гидравлической системы с лучшими элементами приводов для электрических двигателей",- сказал Питер Уитни, младший научный сотрудник Disney Research Pittsburgh. Передача позволяет делать легкие, прочные и изящные манипуляторы, в то время как управлять ими можно легко с помощью двигателей с низким коэффициентом трения. Двигатели, которые обычно значительно увеличивают вес конечностей, могут быть установлены на корпусе робота.
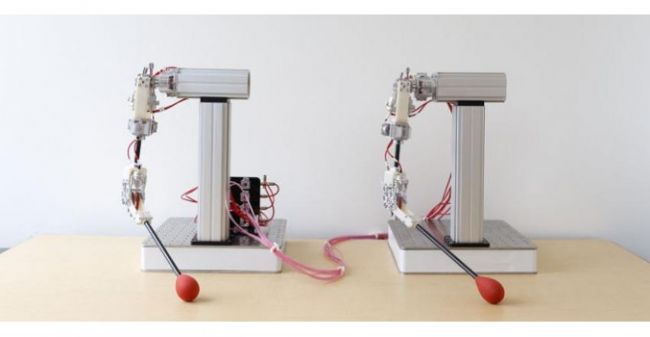
Система передает усилие настолько эффективно, что позволяет построить совершенно пассивную систему управления. Перемещение одной руки робота будет вызывать аналогичное перемещение другой, связанной с ней через эту передачу. Система особенно чувствительны к тактильной обратной связи от управляющей руки. Одним из возможных применений подобной системы из немагнитного металла будет использование в качестве хирургического робота, совместимого с устройствами на основе магнитно-резонансной томографии.
Эта разработка недавно демонстрировалась в Чикаго на IROS 2014 – Международной конференции по интеллектуальным роботам и системам.Гидравлические системы часто используются для манипуляторов, которые должны быть легкими и плавно перемещаемыми. Но обычная гидравлика использует систему клапанов, которые только передают усилие в одном направлении, будучи не в состоянии обратно поглощать энергию. Управление также не настолько точное, какое можно сделать с электродвигателями. Но и у электродвигателей есть свои проблемы, в том числе тяжелый вес.
В отличие от клапанов и скользящих уплотнений обычных гидравлических систем, которые склонны к утечке, эта система использует пару цилиндров с гофрированной мембраной, названных так потому, что резиновая мембрана между поршнем и стенками цилиндров, соединенных жидкостной линией, может самопроизвольно возвращаться назад.
Каждая управляемая, полностью герметичная линия с цилиндрами на каждом конце во многом похожа на тормозную систему автомобиля с жидкостными линиями, главным и управляемыми цилиндрами тормозов. Когда один цилиндр работает на сжатие, противоположный цилиндр раздвигается. Балансировка двух таких приводных линий обеспечивает передачу усилий в двух направлениях.
Подобная гидравлическая передача позволяет эффективно использовать пассивную систему управления с приводом от тяжелого электродвигателя, расположенного за пределами конечностей роботов, что делает манипуляторы более легкими, способными перемещаться быстро и изящно.
Комментарии
(0) Добавить комментарий