Почти все, что летает, будь то самолет, космический корабль или дроны, имеет инерциальные навигационные системы с акселерометрами и гироскопами для контроля отклонений от курса, крена и тангажа и, таким образом, поддержания траектории полета. Однако летающие насекомые, например, пчелы, не имеют инерциальных систем для навигации, они полагаются исключительно на зрение. Этот факт вдохновил двух исследователей из французского Университета Экс-Марсель на постройку беспилотного летательного аппарата, имитирующего такую систему навигации насекомых.
Задача состояла в разработке летательного аппарата, способного обходить препятствия, полагаясь исключительно на визуальную информацию. В статье, опубликованной в февральском номере журнала Bioinspiration @ Biomimetics, Fabien Expert и Franck Ruffier описали, как дрон, который они называют BeeRotor, смог пролететь через кольцевой туннель, избегая столкновений и аварий.
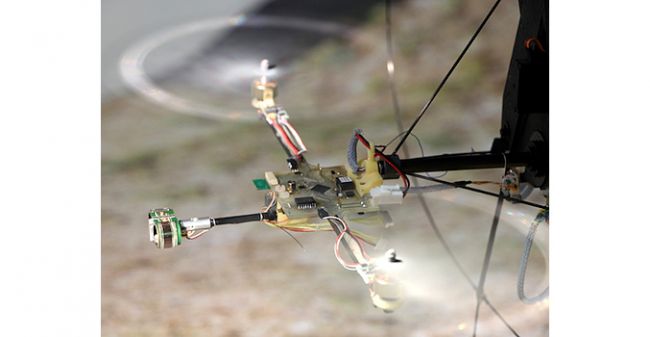
Этот крошечный летательный аппарат не имеет инерциальной системы навигации, а управляется с помощью датчиков панорамного оптического потока (OF) и весит 80 граммов при длине 47 сантиметров. Два вращающихся винта удерживали аппарат в воздухе. Потолок и пол туннеля были покрыты фотографиями с соответствующими природными изображениями. Скорость, с которой детали этих фотографий перемещались под и над БПЛА, непрерывно отслеживается с помощью 26 фотодиодов панорамных оптических датчиков потока.
Принцип работы прибора на основе оптического потока достаточно прост, объясняет Ruffier . Робот не измеряет свою скорость или расстояние от земли, но если детали базовой структуры проходят перед датчиком слишком быстро, датчик оптического потока активизирует систему обратной связи, которая увеличивает скорость вращения винтов, таким образом, аппарат поднимается выше, говорит он.
Блок контроля использует четыре датчика оптического потока, два направлены вперед и два назад от аппарата. Каждый датчик оснащен объективом, который фокусирует изображение на шесть фотодиодов, фиксирующих скорость проходящих мимо элементов, передавая изображение от пикселя к пикселю. Система ориентации позволяет избегать уклона более 30 градусов и удерживать аппарат над поверхностью.
Сейчас команда работает над вертолетом, который сможет свободно летать в пространстве. Это потребует двух дополнительных оптических систем датчиков потока. Они будут контролировать в полете крен и рыскание, так что аппарат сможет отклоняться вправо или влево, когда он приближается к препятствию.
Насколько велика потребность в беспилотных летательных аппаратах, управляемых датчиками оптического потока, если инерциальные навигационные системы хорошо делали ту же самую работу в течение многих десятилетий? Производители дронов задают такой же вопрос, но к новой технологии есть интерес со стороны европейской аэрокосмической промышленности, говорит Ruffier. Зонды, которые отправляются на Луну, Марс или кометы, содержат инерциальные системы, которые составляют около 20 процентов от их веса. Космические агентства, говорит Ruffier, заинтересованы в визуальных навигационных системах, потому что они будут гораздо легче. И даже если они не заменят инерциальные системы на космических аппаратах, они могут выступать в качестве резервных систем, способных повысить надежность в космосе, добавляет он.
Комментарии
(0) Добавить комментарий