Квадрокоптеры способны выделывать невероятные трюки, пролетая через узкие окна и подброшенные обручи. Обычно, когда мы говорим о делающих подобные трюки квадрокоптерах, то должны учитывать разбросанные по стенам комнаты многочисленные датчики и компьютеры, которые и выполняют основную работу, а сам аппарат просто выполняет команды.
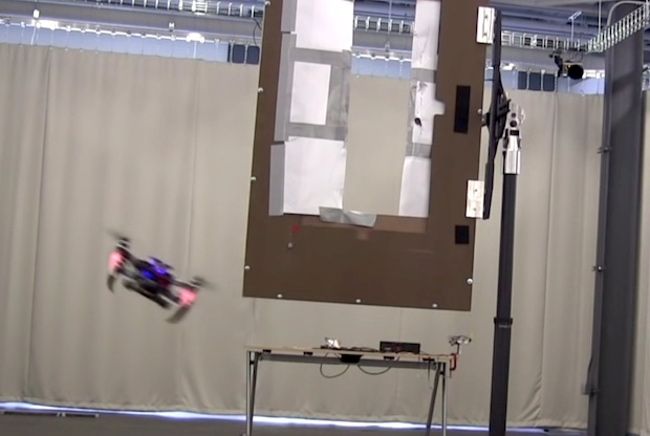
Лаборатория Виджая Кумара в Университете штата Пенсильвания часто удивляет рядом захватывающих трюков в исполнении квадрокоптеров, но последние их достижения достойны восхищения. Им удалось создать четырехвинтовой аппарат, пролетающий через окна с использованием лишь бортовых датчиков и контроллеров. Это означает, что ни одно окно не застраховано от вторжении подобных вертолетов.
Когда наблюдаешь за летающими в помещении квадрокоптерами, то почти всегда можно увидеть на заднем плане систему захвата движения. Закрепленные на стенах массивы видеокамер позволяют ежесекундно сотни раз фиксировать очень точную позиционную информацию.
Для того, чтобы вместить размещаемое на стенах комнаты оборудование на борт маленького БПЛА весом 250 граммов потребовалось шесть лет работы и сопутствующий прогресс в производстве полупроводниковых компонентов. Сейчас этот квадрокоптер включает инерциальный измерительный блок (ИИБ), процессор QualcommSnapdragon и цифровой сигнальный процессор Hexagon. Зато теперь все трюки доступны в любой среде, а не только в стенах специальной лаборатории.
Правда, информация о расположении препятствий относительно исходного положения квадрокоптера предоставляется ему заранее. Аппарат имеет фронтальную стереокамеру, которая обеспечивает детальное картографирование. Но пока она не интегрирована в систему управления (это произойдет в ближайшее время).
Контроль положения квадрокоптера в пространстве выполняется 500 раз в секунду, используя только установленную на нижней плоскости камеру и ИИБ. Это одна из самых сложных частей задачи автономного перемещения, поскольку величина зазора, в который можно протиснуться, зависит от того, где аппарат находится. Все потому, что квадрокоптер движется довольно агрессивно со скоростью 4,5 м/с, с ускорением свыше 1,5 g, а крен и тангаж у него с углом до 90 градусов.
Исследователи в настоящее время работают над задачей создания карт пространства в режиме реального времени, проблемами обнаружения препятствий и динамического планирования, которые они уже продемонстрировали (на более крупной платформе) в рамках программы FLA DARPA.
Комментарии
(0) Добавить комментарий