По данным исследователей Корнельского университета, роботы могут лучше людей выполнять наблюдение, общаясь со скоростью света и обмениваясь визуальными данными.
Исследователи университета разрабатывают систему, позволяющую группе перемещающихся на местности роботов обмениваться информацией и, в случае необходимости, получить помощь в интерпретации того, что они видят. Подобная система позволяет им вести наблюдение как единое целое с множеством глаз. Помимо использования при наблюдении, новая технология способна избавить людей от опасных работ по утилизации противопехотных мин, уборке ядерных отходов или осмотру повреждений после наводнений и ураганов.
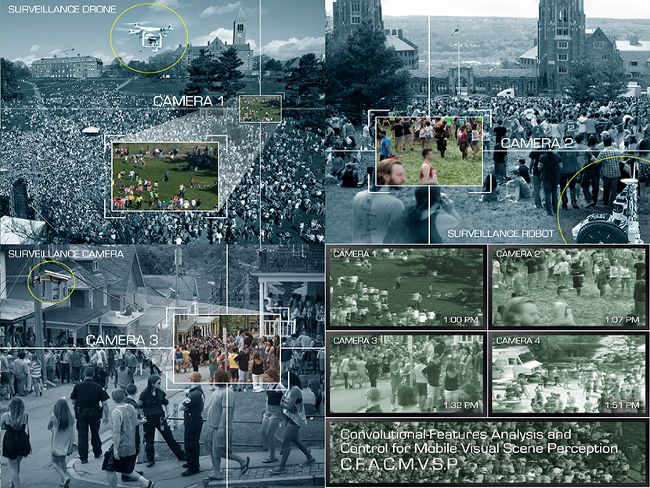
Исследователи используют обширный опыт работы с системами компьютерного зрения, чтобы сравнивать и комбинировать изображения одной и той же зоны с нескольких камер, идентифицировать и отслеживать перемещающиеся объекты и людей. Эта работа требует новаторских подходов, потому что большинство прежних работ в этой области было сосредоточено на анализе изображений всего лишь одного видеоустройства, зачастую неподвижного. Новая система будет компилировать информацию от стационарных камер, мобильных наблюдателей и внешних источников.
Подвижные наблюдатели могут размещаться на беспилотных воздушных и наземных транспортных средствах, использоваться в виде человекоподобных роботов, блуждающих в толпе людей. Они будут посылать свои изображения на центральный пульт управления, который будет иметь доступ к другим камерам в данной зоне, а также подключаться к сети Интернет для помощи в распознавании увиденного. Система может отметить подозрительное лицо, а затем отслеживать его в толпе.
Базовой технологией является ИИ с глубоким обучением, что обеспечивает компьютерную интерпретацию изображений, и «байесовское моделирование», которое позволяет постоянно обновлять модель мира, как только новые данные поступают в систему. Программирование будет также включать «функцию планирования», чтобы выяснить, как получить дополнительные данные, которые могут быть необходимы для разрешения неопределенности. Это поможет мобильным агентам избегать препятствий и, в случае необходимости, направляться в те места, где требуется более пристальное наблюдение.
В то время как ВМФ США могут развернуть такие системы для наблюдений с БПЛА или другого автономного транспорта, исследователи планируют испытания в кампусе Корнельского университета, используя роботов для наблюдения за многолюдными площадями. Сейчас подобные задачи выполняются с помощью веб-камер.
Комментарии
(0) Добавить комментарий