 - пассивный экзоскелет")
Здравствуйте друзья! По мнению многих, робототехника должна помогать человеку выполнять те или иные задачи. Ярким примером такого взаимодействия является разработка команды из Перми - экзоскелет, помогающий при работе с тяжелым ручным инструментом.
Команда разработчиков:
Сейчас в команде 3 постоянных участника:
Игорь Фалин – представитель проекта;Николай Белоногов – инженер-конструктор;
Михаил Игумнов – инженер-механик.
Также нам помогают сотрудники ПНИПУ. И, да — мы ищем людей, которые смогут быть полезны проекту.
Контактная информация:
Игорь Фалин:
igorfalin@live.com
8(964)1874878
vk.com/anymaventy
Описание идеи:
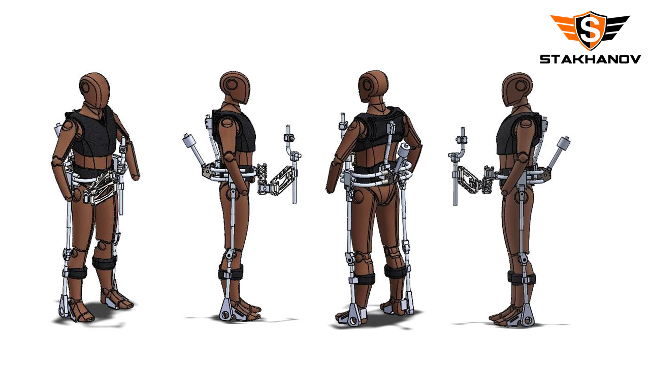
Продукт «Stakhanov» - пассивный экзоскелет, предназначенный для повышения производительности и снижения травмоопасности при работах с тяжелым ручным инструментом.
Проект предлагает решение проблемы работы с тяжелым ручным инструментом для человека посредством создания пассивного экзоскелета, повышающего производительность труда работника в 2-5 раз.
Направление:
Промышленность, производство, строительство.
Целевая аудитория, сфера использования:
Данный продукт будет полезен в отраслях и сферах работ, где используется тяжелый ручной инструмент. Основные группы потребителей:
- Машиностроительная (судо-, авиа-, автомобиле-, ракетостроение и т.п.);
- Строительная (отделочные, монтажные и др. работы);
- Аварийно-спасательная (МЧС – работа с переносным инструментом: гидравлические ножницы, резаки и др.).

Подробнее о разработке:
Вся конструкция создана с учетом компенсирующих нагрузок и перераспределения полезного веса на внешний каркас, который, в свою очередь, передает нагрузку поверхности, на которой расположен работник.
Конструкция энергонезависима и не нуждается в источниках питания. Инициатором движения является пользователь экзоскелета.
Также конструкция экзоскелета позволяет зафиксировать положение тела при работе и тем самым снять нагрузку с опорно-двигательного аппарата (пример такого положения – работы, проводимые в полуприседе при конвейерной сборке автомобилей).
На данный момент проект находится на стадии разработки первого тестового прототипа. Планируем завершить этот этап в течении года и выпустить продукт на испытания на реальной площадке.
Комментарии
(0) Добавить комментарий