Автономные роботы могут осматривать атомные электростанции, очищать нефтяные разливы в океане, сопровождать истребители в бою и исследовать поверхность Марса. Тем не менее, несмотря на все их таланты, роботы все еще не могут приготовить чашку чая.
Такие задачи, как включение плиты, снятие с нее чайника, поиск молока и сахара, требуют перцептивных способностей, которые для большинства машин по-прежнему недоступны. Среди них и способность восприятия трехмерных форм объектов. Хотя «видеть» объекты для роботов с камерами и другими датчиками относительно просто, но значительно сложнее мгновенно интерпретировать то, что они видят.
Как говорит выпускник Университета Дьюка Бен Берчфил, самые сложные роботы в мире еще не могут делать то, что делает большинство детей автоматически, но он и его коллеги могут способствовать решению этой задачи. Берчфил и его научный руководитель Джордж Конидарис разработали новую технологию, которая позволяет машинам воспринимать трехмерные объекты близко к тому, как это делают люди.
Например, робот, который убирает посуду со стола, должен быть способен адаптироваться к огромному разнообразию чашек, тарелок и блюдец разных размеров и форм, расставленных беспорядочно.
Человек с одного взгляда на новый объект понимает, что это такое, независимо от места и положения среди других объектов. Даже когда объект частично скрыт, мы мысленно заполняем части, которые не видно.
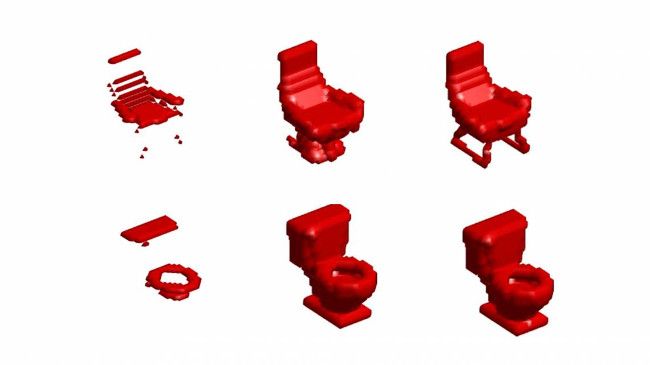
Новый алгоритм восприятия для робота может одновременно догадываться, что такое новый объект, и как он ориентирован, не рассматривая его первоначально под разными углами. Он также может «представить» любые части, которые не видны.
Например, роботу с использованием этой технологии не нужно будет видеть каждую сторону чайника, чтобы знать, что у него, вероятно, есть ручка, крышка и носик, и находится он на плите или снят с нее.
Исследователи говорят, что новый подход делает в три раза меньше ошибок и быстрее действует, чем лучшие современные методы. Это важный шаг на пути к роботам, которые работают вместе с людьми в домах и в других реальных условиях, которые менее упорядочены и предсказуемы, в сравнении с лабораторией.
Система действует достаточно быстро, весь процесс занимает около секунды, но он все еще далек от человеческого восприятия, сказал Берчфил. Новый алгоритм, как и прежние методы, легко ошибается при распознавании с определенных точек зрения похожих по форме объектов. Они могут, видя стол сверху, ошибочно принимать его за комод.
«Ошибка в распознавании чуть меньше 25% вместо половины случаев при прежнем методе, поэтому это большое улучшение, - сказал Берчфил. - Но робот все еще не готов к использованию в доме. Ведь вы не хотите, чтобы робот помещал подушку в посудомоечную машину».
Сейчас команда работает над расширением своего подхода, чтобы роботы могли мгновенно различать тысячи типов объектов, заполняя слепые пятна и восстанавливая невидимые детали.
Комментарии
(0) Добавить комментарий