Прежде считалось, что даже сложные мобильные роботы не могут обойти преграды из двух столов на их пути. Робот распознает стол как препятствие, пытается спланировать путь вокруг него, а затем отказывается от продолжения, когда терпит неудачу.
Это происходит потому что роботы, как правило, не знают свойств большинства объектов, и как с ними можно действовать. Они просто считают их препятствиями, которые следует избегать.
Обычно поставленный в коридоре стол не способен удержать человека, потому что люди понимают, что столы представляют собой физические объекты, которые могут быть перемещены. Человек просто сдвинет стол и продолжит свой путь.
На IROS 2016 года в Южной Корее исследователи из Технологического института Джорджии представили доклад на тему «Навигация среди перемещаемых препятствий с изучением динамических ограничений», который дает такую же возможность мобильным манипуляторам. Они могут распознавать объекты на своем пути и способны, изобретательно действуя, добраться туда, куда им нужно прийти.
Проблема перемещения через заполненное мебелью пространство является очень распространенным случаем в домашних условиях и в офисах, где вещи могут быть нагромождены непредсказуемым образом. В отличие от упорядоченной среды (заводы и лаборатории и тому подобное), не всегда можно предсказать и точно моделировать, как именно внутренняя среда будет заполнена, что делает ее прохождение намного сложнее для роботов. Таким образом, даже если робот достаточно умен чтобы перемещать встречающиеся на пути объекты, он также должен уметь адаптироваться, когда объекты, которые он рассчитывает сдвигать в одну сторону, либо двигаются по-другому или не двигаются вообще.
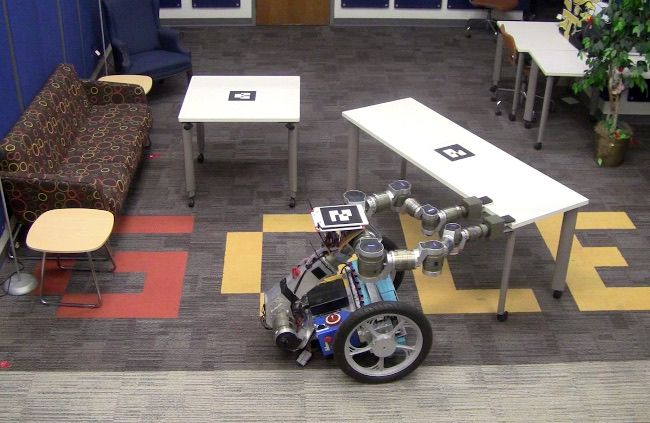
Команда исследователей из Джорджии под руководством профессоров Чарльза Л. Исбелла и Хенрика И. Кристенсена научила робота Krang двигаться в заполненном объектами пространстве, комбинируя свои знания по планированию пути среди подвижных объектов, с обучением по методу проб и ошибок. По существу, Krang способен использовать «физический движок», чтобы понять и предсказать как объект будет себя вести, а затем использовать эти знания чтобы адаптивно переместить эти объекты, продвигаясь к своей цели.
Вначале робот пытается грубой силой сдвинуть сразу оба стола, а когда этот метод не работает планирует другие действия. Робот не имеет понятия, насколько тяжелы два стола, когда он пытается переместить их. Каждый раз, когда поведение одного из столов не соответствует ожиданиям, робот обновляет физическую модель стола, а затем придумывает улучшенное решение, которое включает в себя новые ограничения.
Такого типа адаптивное обучающее поведение люди используют все время, и оно будет важным навыком для мобильных роботов, оказавшихся в загроможденных мебелью жилищах и офисах.
Для того, чтобы Krang на самом деле мог делать такие фокусы в реальных условиях, ему нужно научиться обходиться без расположенной сверху шести-камерной системы машинного зрения и некоторых предварительно запрограммированных стратегий манипуляции. Над этим сейчас и работают исследователи.
Комментарии
(0) Добавить комментарий