")
Крошечные роботизированные насекомые могут казаться весьма забавными, но потенциал этих кибер-созданий для видеонаблюдения, поисково-спасательных и сельскохозяйственных работ просто огромен, впрочем, как и количество сложных задач при их создании.
Источники питания, встроенные датчики, система управления и стабилизации – все это непросто реализовать на микроуровне. Именно над последней проблемой — стабильностью полета — работали исследователи из Университета Южной Калифорнии (USC) со своим роботом Bee+, интерпретируя и стараясь применить на практике природные механизмы.
Созданием миниатюрных летающих роботов, похожих на насекомых, занимается немало исследователей уже несколько лет. Например, в 2007 году при финансовой поддержке DARPA был создан робот-муха, который мог только взлетать в воздух и опускаться. А в 2008 году DelFly Micro весом три грамма был зарегистрирован Книгой рекордов Гиннесса как самый маленький оборудованный видеокамерой самолет в мире. Но когда в 2013 году в Гарварде появился RoboBee весом всего 80 миллиграмм, DelFly Micro в сравнении с ним выглядел как курица.
Исследовательская группа USC усовершенствовала RoboBee в своем проекте Bee+, который был представлен в этом месяце в журнале IEEE Robotics and Automation Letters. RoboBee из Гарварда был ограничен в маневренности тем, что у него была только одна пара крыльев. Это затрудняло управление полетом и порой роботу не хватало стабильности в воздухе. С одной парой крыльев, каждое из которых управляется крошечным пьезоэлектрическим приводом весом 25 мг, операторы RoboBee могут влиять на крен, тангаж и тягу, но не могут корректировать отклонение от курса.
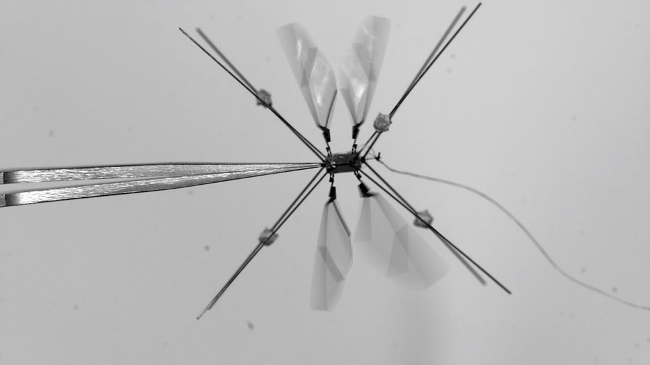
Исследователи USC отметили, что для того, чтобы добавить контроль курса, Bee+ требуется четыре крыла, как у настоящих насекомых. Но в этом случае может значительно увеличиться вес, что делало крошечного робота слишком тяжелым для полета.
Поэтому команда USC разработала более легкие и качественные приводы. В RoboBee используются биморфные приводы, состоящие из трех слоев. А в Bee+ применили униморфные приводы. В них используется только одна полоска пьезоэлектрического материала, которая перемещает пассивный слой вперед и назад. В результате улучшилось управление полетом — Bee+ способен следовать по заданному курсу и избегать препятствий. А поскольку униморфные приводы проще, их дешевле изготовить.
Однако для совершенствования летающих микро-роботов предстоит еще многое сделать. Bee+ все еще тяжелее шмеля примерно в 10 раз, есть проблемы с бортовым питанием и микросхемами, которые должны быть достаточно маленькими, чтобы обеспечить требуемую грузоподъемность и набор различных функций, необходимый для работы и исследований в разнородных научных дисциплинах.
Комментарии
(0) Добавить комментарий