В условиях дальнейшего сокращения размеров датчиков, компьютеров, исполнительных механизмов и батарей, при одновременном повышении их эффективности появляется возможность создавать роботов гораздо меньшего размера, не жертвуя при этом их возможностями.
Однако, если создавать робота, который должен взаимодействовать с людьми или объектами подобного размера, имеется нижний предел приемлемых размеров. Но продолжить миниатюризацию компонентов возможно, если роботов делать модульными. Другими словами, большие роботы могут состоять из множества маленьких роботов.
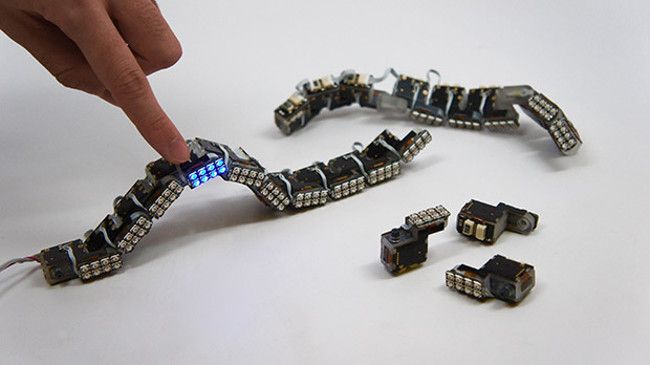
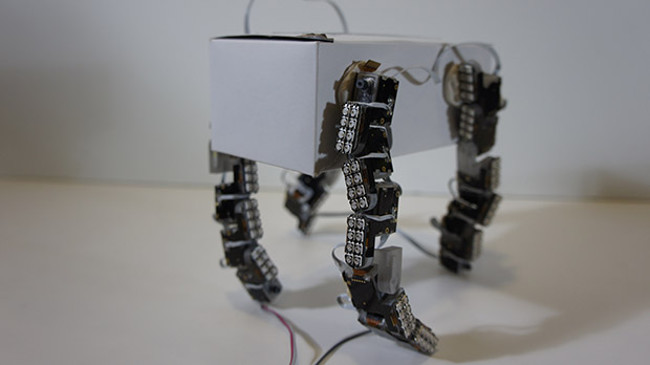
В известной мере это сделать более сложно, потому что если один робот имеет определенный уровень сложности, то для N роботов сложность конструкции увеличивается в степенной зависимости для числа N. Однако, если можно решить все проблемы коммуникации и координации составляющих элементов, модульная система имеет целый ряд преимуществ. Можно сделать роботов любого размера и в любой конфигурации, они удобны для ремонта и перенастройки «на лету». Интересным воплощением этой идеи стал змееобразный робот ChainFORM, который является развитием прошлогодней змеи LineFORM. Этот многофункциональный модульный робот может быть разделен на сегменты необходимой длины с соответствующей перенастройкой.
Разработчики из Медиа лаборатории Массачусетского технологического института называют ChainFORM «изменяющим форму интерфейсом». Каждый модуль ChainFORM включает сенсорную систему контроля касания, систему контроля углового наклона, мерцающие светодиоды и сервопривод для перемещения. Система взаимодействия модулей является наиболее сложной в конструкции робота, который должен автоматически определить количество используемых модулей и форму соединения их друг с другом. Поскольку постоянно известны относительное положение и ориентация каждого модуля, можно создавать массу интересных конструкций.
Соединенные в цепочку модули ChainFORM питаются от общего источника энергии, имеется основной блок управления, который взаимодействует с компьютером через USB. Длина цепочки определяется мощностью источника питания и на данный момент не может превышать 32 модуля, если не подавать питание с другого конца цепочки. Модули обладают достаточной для перемещения мелких предметов мощностью, двигатель каждого модуля имеет крутящий момент на валу 0,8 кг/см. Этого усилия будет достаточно для тактильной обратной связи при надавливании пальцем вашей руки. Робот способен перемещать груз много больше собственного веса.
ChainFORM имеет большой потенциал для полезных усовершенствований, по мнению разработчиков. Они хотят разместить дисплеи на каждой поверхности и увеличить их разрешение. Планируется увеличить количество соединительных конфигураций для подключения различных модулей и способов их разветвления. Они хотят также, чтобы модули могли самостоятельно собираться, что уже умеют делать некоторые модульные роботы. Исследователи также обсуждают такие идеи, как добавление различных видов сенсорных и приводных модулей, что, безусловно, расширит возможности системы в целом без увеличения трудоемкости отдельных модулей.
Комментарии
(0) Добавить комментарий