
Во время аварии на АЭС Фукусима в Японии заметно было отсутствие японских роботов, которые могли бы реально помочь. И тут возникает вопрос, а почему Honda не отправила ASIMO — возможно, сегодня одного из самых сложных и способных человекоподобных роботов. Ответ заключается в том, что ASIMO не способен работать в подобных или других экстремальных условиях.
Этот робот никогда не был предназначен для использования при ликвидации последствий стихийных бедствий. Он был разработан для работы в офисах, которые не подвержены землетрясениям, взрывам, вторжению инопланетян или другим непредвиденным происшествиям. Honda ясно осознает ограниченные возможности ASIMO в разрешении таких ситуаций и, вероятно, поэтому компания разработала новую версию ASIMO, который специально предназначен для работы в чрезвычайных ситуациях.
На завершившейся на прошлой неделе Международной конференции по интеллектуальным системам и роботам (IROS) специалисты Honda представили два доклада по теме человекоподобных роботов для ликвидации последствий стихийных бедствий. Исследователи отметили, что они уделяют особое внимание таким сложным задачам, как преодоление переходов и восхождение по лестницам. Было приятно видеть, что экспериментальный ASIMO уже способен на некоторые впечатляющие вещи.
В ходе недавних испытаний DARPA Robotics Challenge роботы должны были подниматься по очень крутой лестнице. Это было довольно трудное задание и в финале DRC лестницы были короче и вовсе не крутые. Но Honda не требует от робота хождения по лестничным маршам — их робот взбирается по вертикальной лестнице, начиная подъем с узкого помоста. Мы никогда не видели раньше робота, демонстрирующего подобные навыки. Это трудно сделать, потому что перекладины лестницы узкие и скользкие, любые позиционные ошибки и движения могут привести к потере равновесия и падению.
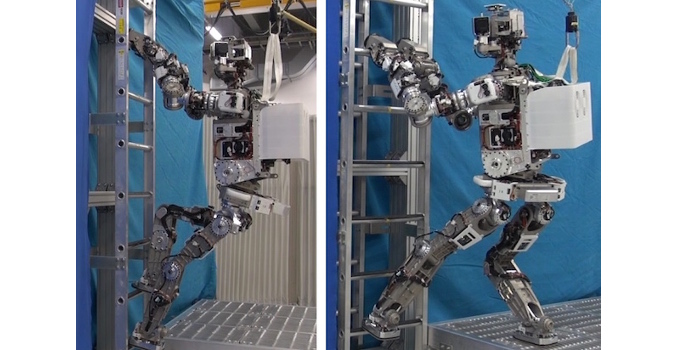
Разработанный Honda метод управления в режиме реального времени непрерывно контролирует положение туловища робота и вносит необходимые коррективы, чтобы компенсировать любые ошибки. В результате имеем «надежное восхождение по многоступенчатой лестнице и переход на двух ногах с лестницы на помост». По-видимому, робот способен взбираться довольно быстро, и Honda сообщает, что он действует даже более быстро и эффективно, чем всходящий по наклонной лестнице робот.
На конкурсе DRC выяснились преимущества роботов с разнообразными способностями перемещения, которые могли не только ходить, но также могли ездить на колесах или переходить на четвероногий способ перемещения, когда это было необходимо или выгодно. Специалисты Honda также изучают эту идею, однако, они пытаются сделать это без изменения гуманоидной формы. По сути, они создали робота в виде обезьяны.
В отличие от других роботов-гуманоидов, которые также могут переходить на ходьбу на четырех ногах, робот Honda может это сделать динамически, без поддержания статического центра тяжести. Это делается очень быстро: перемещающийся на двух ногах робот способен приблизительно через 2 секунды делать это уже на четвереньках. При этом, он выполняет изящный трюк: вращает пару маховиков на туловище. Выглядит очень эффектно!
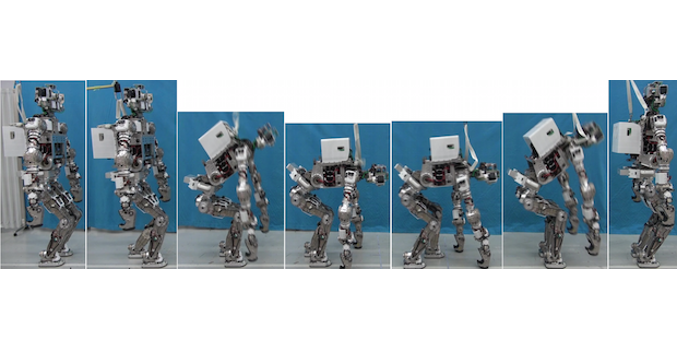
Также быстро он может вернуться в прежнее положение и двигаться с постоянной скоростью около 0,5 км/ч. Балансировочное программное обеспечение включает расширенные алгоритмы, которые сохраняют ASIMO в вертикальном положении. Исследователи надеются разработать автономное планирующее программное обеспечение, который позволит роботу динамически перемещаться в разных условиях.
Комментарии
(1) Добавить комментарий