")
На проходившей в Сиэтле конференции по робототехнике ICRA 2015, исследователи из Массачусетского технологического института показали свободно перемещающегося, миниатюрного робота, конструкция которого напоминает фигурки оригами.
Он самостоятельно собирается, может перемещаться по различным поверхностям, включая водную, а за ненадобностью его можно просто растворить. Это общее представление возможностей робота. Если взглянуть на него пристальнее: в течение нескольких секунд робот самостоятельно складывается из заготовки в виде листа со встроенной магнитной системой и сразу же готов носиться по твердой или водной поверхности, управляемый магнитным полем. А затем, когда потребность в нем исчезает, его можно просто растворить в банке с ацетоном. Впервые робот иллюстрирует полный жизненный цикл, что, в конечном итоге, можно будет делать внутри человеческого тела.
В развернутом виде робот, который изготовлен из магнитов, расположенных между двумя слоями обработанной лазером пленки или бумаги, представляет собой квадрат со стороной 1,7 см и весит всего 0,31 гр. После размещения на нагревательном элементе, пленка начинает сжиматься строго по конструктивно заданным линиям, за счет чего робот складывается. В течение минуты робот завершает процесс сборки и готов к использованию, перемещаясь в близлежащем пространстве со скоростью от 3 до 4 см/сек.
Одним из нюансов является то, что двигательная установка робота на самом деле не интегрирована в самоскладывающуюся и растворяемую структуру. Двигатель робота состоит из двух частей. Есть кубической формы, постоянный, неодимовый магнит, а также набор из четырех электромагнитных катушек, которыми робот управляет, чтобы создать перемещающие его магнитные поля.
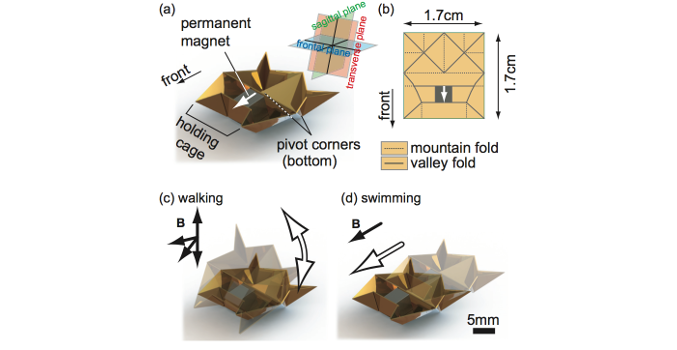
Вам может быть интересно понять, зачем робот колеблется при перемещении, если есть магнитное поле, которое может просто перетащить его? Во-первых, магнитное поле однонаправленное и не может перетаскивать робота в любую точку, вместо этого используется простое включение и выключение поля с частотой около 15 Гц. Это приводит к тому, что магнит, а также и робот к которому он прикреплен, начинает колебаться взад и вперед. При этом происходит следующее: передние и задние опоры робота попеременно касаются поверхности основания, а асимметрия конструкции в сочетании с намеренно смещенной точкой равновесия заставляет робота двигаться вперед. Весь этот механизм не работает в его развернутой, плоской конфигурации. Робот должен быть сложен, чтобы перемещаться.
К другим преимуществам колеблющегося робота, в сравнении с простым магнитным приводом, является способность плавать, а также возможность более эффективно выполнять такие задачи, как перемещение грузов или прокапывание пути в зыбкой преграде. Но это еще не все возможности. Вы можете оптимизировать конструкцию и для любой другой задачи. Этот робот большой универсал. Если есть желание пофантазировать, тогда вы можете сделать процесс складывания многоступенчатым. При низком нагреве получается одна конструкция, а повторный нагрев с повышенной температурой способен будет привести к созданию другого варианта робота.
Когда робот выработает свой ресурс, вы можете отправить его в банку с ацетоном и он будет полностью растворен (кроме магнита, конечно). Можно также создать для роботы конструкционные слои, которые растворяются в воде. Создание полностью растворяемого в воде робота немного сложнее, но исследователи, похоже, уверены, что это будет возможно в ближайшем будущем. Также возможно впоследствии интегрировать в корпус робота самоскладывающиеся датчики, что позволит обеспечить автономную работу и, в конечном итоге, робот сможет перемещаться во внутренних органах человека.
Комментарии
(0) Добавить комментарий