
Мир сошел с ума с новостями о робототехнике, почти каждый день появляются сообщения о начинающейся революции роботов. Но насколько оправдана вся эта рекламная шумиха, ажиотаж, а иногда и страхи? Действительно ли начинается революция роботов?
В ответ можно заметить, что в некоторых областях нашей жизни мы, вероятно, увидим в ближайшее время пополнение среди роботов. Но в реальности не стоит ожидать, что в самом ближайшем будущем десятки роботов выйдут на улицы или будут бродить в наших офисах.
И одна из основных причин этого заключается в том, что роботы не имеют возможности по-настоящему видеть мир. Но прежде чем говорить о том, как роботы в будущем смогут видеть мир, сначала мы должны разобраться в том, что на самом деле подразумевает зрение.
Как мы видим?
У большинства людей есть два глаза и мы используем их для того, чтобы собирать свет, который отражается от объектов вокруг нас. Наши глаза конвертируют этот свет в электрические сигналы, которые передаются по зрительным нервам и сразу же обрабатываются нашим мозгом.
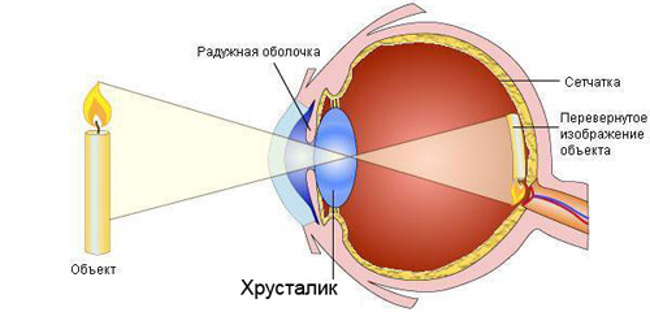
Наш мозг тем или иным образом определяет, что находится вокруг нас на основе всех этих электрических импульсов и собственного опыта. Все это создает представление о мире и позволяет ориентироваться, помогает нам подбирать вещи, позволяет распознавать друг друга в лицо и делать миллион других дел, которые мы считаем само собой разумеющимися. Вся деятельность, от сбора светового потока в наших глазах, до понимания окружающего мира – именно это обеспечивает нам возможность видеть.
Исследователи подсчитали, что для обслуживания процесса зрения используется до 50% объема нашего мозга. Почти все животные имеют глаза и могут частично видеть. При этом, большинство животных и насекомых имеют гораздо более простой, чем у людей, мозг. Но действует он хорошо.
Таким образом, некоторые формы зрения могут быть достигнуты без массивной, компьютерного уровня мощи мозга млекопитающих. Возможность видеть явно продиктована ее существенной полезностью в процессе эволюции.
Зрение роботов
Поэтому неудивительно, что многие исследователи в области робототехники прогнозируют, что если робот сможет видеть, то мы, скорее всего, на самом деле получим бум в развитии робототехники. И роботы может быть, наконец, станут настоящими помощниками человека, чего так хочется многим людям.
Как же мы научим роботов видеть? Первая часть ответа на этот вопрос очень простая. Мы используем видеокамеру, точно такую же, как в вашем смартфоне, чтобы получать постоянный поток изображений. Сама по себе технология видеокамер для роботов является серьезным объектом исследований. Но пока просто представим себе стандартную видеокамеру. Мы передаем эти изображения в компьютер, а затем есть разные варианты действий.
С 1970-х годов разработчики занимаются совершенствованием систем машинного зрения для роботов, изучают характерные черты изображений. Это могут быть линии или такие представляющие интерес точки, как углы или определенные текстуры. Программисты создают алгоритмы, чтобы находить эти характерные черты и отслеживать их кадр за кадром в видеопотоке.

Таким образом существенно сокращается объем данных из миллионов пикселей в изображении до нескольких сотен или тысяч характерных фрагментов.
В недавнем прошлом, когда вычислительные мощности были более ограниченными, это имело очень важное значение. Далее инженеры думают над тем, что робот скорее всего увидит и что он должен делать. Они создают программное обеспечение, которое будет просто распознавать шаблоны, чтобы помочь роботу понять, что находится вокруг него.
Окружающая среда
Программное обеспечение позволяет создать только базовую картину окружающей среды, в которой робот действует, или может попытаться сопоставить найденные характерные особенности с библиотекой примитивов из встроенного программного обеспечения.
В сущности, роботы запрограммированы человеком для того, чтобы увидеть вещи, которые, по мнению человека, роботу необходимо видеть. Есть много успешных примеров реализации подобных систем машинного зрения, но практически сегодня нет роботов, которые способны ориентироваться в окружающей обстановке лишь за счет машинного зрения.
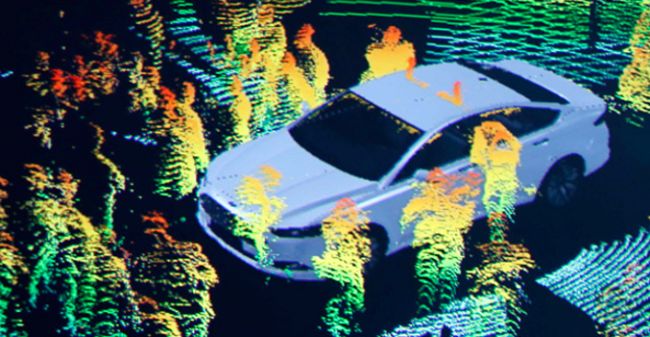
Такие системы еще не достаточно надежны, чтобы гарантированно предотвратить для робота падения и столкновения в процессе перемещения. В беспилотных автомобилях, о которых в последнее время много говорят, в дополнение к системе машинного зрения используются лазеры или радары.
В последние пять-десять лет начались исследования и разработки нового поколения систем машинного зрения. Эти исследования позволили создать не запрограммированные системы, как ранее, а изучающие то, что они видят. Для роботов были разработаны системы зрения по аналогии с тем, как ученые представляют себе принципы зрения у животных. То есть они используют концепцию нейронных слоев, как в мозгу у животных. Разработчики создают структуру системы, но не закладывают алгоритм, на основе которого эта система работает. Иными словами оставляют на усмотрение робота его совершенствование.
Этот метод известен, как машинное обучение. Подобные технологии сегодня начинают внедряться благодаря тому, что стали доступны серьезные вычислительные мощности по разумной стоимости. Инвестиции в эти технологии идут в ускоренном темпе.
Коллективный разум
Значимость обучения роботов состоит еще и в том, что они могут легко обмениваться своими знаниями. Каждому роботу не придется изучать все с нуля, как новорожденному животному. Новый робот может действовать, учитывая действия и опираясь на опыт других роботов.
Один робот может узнать, как выглядит кошка и передать эти знания тысячам других роботов. Еще более существенно, когда один робот может решить сложную задачу, например, как перемещаться в определенной части города и мгновенно поделиться этим знанием со всеми остальными роботами.
Не менее важно то, что роботы, которые делятся опытом, могут также и учиться совместно. Например, каждый из тысячи роботов может наблюдать за разными кошками, делиться этими данными друг с другом через интернет. Так они могут научиться совместно классифицировать всех кошек. Это пример распределенного обучения.
Тот факт, что в будущем роботы будут способны обучаться совместно и распределенным образом, имеет глубокие последствия и, пугая одних, в то же время захватывает воображение других.
Реальная робо-революция
Сегодня есть масса применений для роботов, которые могут видеть. Не трудно найти в нашей жизни сферы, где такие роботы могут помочь.

Первые примеры использования роботов, которые могут видеть, скорее всего, будут в отраслях, которые испытывают нехватку рабочей силы, таких как сельское хозяйство, или по своей сути непривлекательны для человека и могут быть опасными. Например, поисковые работы после стихийных бедствий, эвакуация людей из опасных зон или работы в замкнутых и труднодоступных пространствах.
Порой людям трудно сохранять внимание в течение длительного периода наблюдения, что также может быть реализовано с помощью робота, который может видеть. Наши будущие домашние роботы-компаньоны будут гораздо более полезными, если они смогут нас видеть.
И в операционной, по-видимому, мы вскоре увидим роботов, которые будут помогать хирургам. Совершенное зрение робота, их супер точные фиксаторы и руки позволят хирургам сосредоточиться на основной задаче - выборе решения.
Комментарии
(0) Добавить комментарий