Одним из священных Граалей в роботизированной хирургии является способность выполнять малоинвазивные операции, руководствуясь результатами сканирования в режиме реального времени от магнито-резонансного томографа (МРТ). Проблема в том, что пространство внутри камеры МРТ недостаточно для человека, не говоря уже о человеке и роботе. Более того, в томографах используются очень мощные магнитные поля, что не позволяет размещать внутри металл и ограничивает применение роботов.
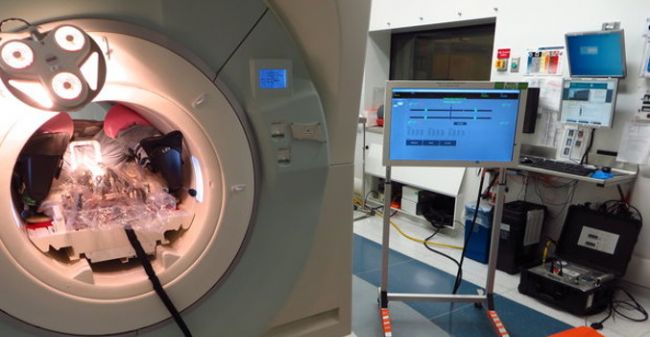
В настоящее время исследователи из политехнического института Вустера (WPI) разрабатывают совместимый с томографами роботизированный хирургический инструмент, который поможет преодолеть эти ограничения. Новая система выполнена не из металла, в ней используются пластиковые элементы и керамические пьезоэлектрические двигатели, что позволяет безопасно использовать ее внутри камеры МРТ.
Инструмент в настоящее время проходит испытания в Бостоне на пациентах, перенесших биопсию предстательной железы. Радиологи могут использовать изображения с МРТ в режиме реального времени, чтобы направлять движения роботизированного ассистента, который по их мнению, обеспечит беспрецедентную точность.
Профессор WPI Фишер говорит, что одной из проблем в создании этого робота была необходимость устранения взаимодействия радиоизлучения робота с магнитными и электрическими полями томографов. Его группа первоначально экспериментировала с пневматическими приводами для перемещения устройства. "Если вы используете воздух – в этом случае нет электрических сигналов, так что, кажется, что все должно быть великолепно", - говорит Фишер. Но он не доволен результатами. "Очень трудно, используя лишь давление воздуха, обеспечить достаточно точное управление, вы обязательно получите вибрации и промахи инструмента", - говорит он.
Чтобы решить эту проблему профессор и его коллеги заменили драйвера на новые с пьезоэлектрической системой привода, использующей прямой цифровой синтезатор, который генерирует точные сигналы для работы робо-инструмента.
Исследователи также упаковали всю управляющую электронику в переносной кейс, который размещается рядом с МРТ. Обмен сигналами с размещающимся внутри роботом идет через волоконно-оптический кабель. "Вы можете перенести его в любое помещение с МРТ и он будет запущен в работу в течение часа", - говорит Фишер.
В настоящее время при операции биопсии, доктор определяет местоположение устройства, а также принимает решение о вставке иглы. С врачом настолько все ясно, что вы можете спросить: Можно ли этот инструмент действительно квалифицировать как робота? Фишер утверждает, что устройство имеет некоторую автономию, так как определяет местонахождение внутри томографа и позиционирует свои сочленения так, чтобы переместиться в указанное место.
И добавляет, что в лабораторных испытаниях они показали, что система способна автономно управляться и вставлять иглу на основе считанных данных от МРТ. "Она может найти цель, отслеживать иглу и, если она отклоняется во время вставки, то может управлять иглой, чтобы попасть в цель", - отмечает Фишер. Тем не менее, эта передовая система еще не готова для клинических испытаний. "Мы пока учим ребенка ходить, чтобы получить робота для условий клинической практики", - говорит он.
Комментарии
(0) Добавить комментарий