Операция на внутреннем ухе относится к очень искусным процедурам и, как правило, требует хирургического удаления всего сосцевидного отростка височной кости. Тем не менее, в будущем, эту операцию сможет делать любой хирург. А поможет ему робот под названием NiLiBoRo, позволяющий вырезать внутри кости туннель диаметром 5 мм.
Роботизированная система способна в процессе сверления кости контролировать процесс, обходя такие чувствительные ткани, как кровеносные сосуды и нервы. Новая технология будет демонстрироваться в Дюссельдорфе с 16 по 19 ноября на выставке ComPaMED.
Создающие эту технологию немецкие специалисты назвали ее NiLiBoRo. Это немецкий акроним от выражения «Процесс нелинейного сверления». Система разрабатывается в рамках проекта Mannheim исследователями из группы по автоматизации в медицине и биотехнологии, работающими в Институте Фраунгофера над системами автоматизации и технологиями производства в сотрудничестве с Техническим университетом Дармштадта, университетом Аахена и Университетской клиникой Дюссельдорфа.
Имеющиеся сегодня медицинские бормашины способны сверлить кость лишь по прямой линии. «NiLiBoRo впервые позволяет делать это, обходя при необходимости отдельные участки», говорит участник проекта Леннарт Карстенсен. Именно эта особенность позволяет выполнять минимально инвазивные операции при опухолях на внутреннем ухе. Если туннель делать в кости по прямой линии, это многократно повышает боль из-за сверления вблизи от нервных волокон. Чтобы избежать травмирования нервных тканей, туннель должен быть не более чем 1 - 2 мм в диаметре. Однако, с помощью такого небольшого отверстия невозможно выполнить операцию. И тут на помощь приходит NiLiBoRo, который способен обходить чувствительные зоны. Он позволяет сделать туннель диаметром 5 мм, чего вполне достаточно, чтобы выполнить операцию.
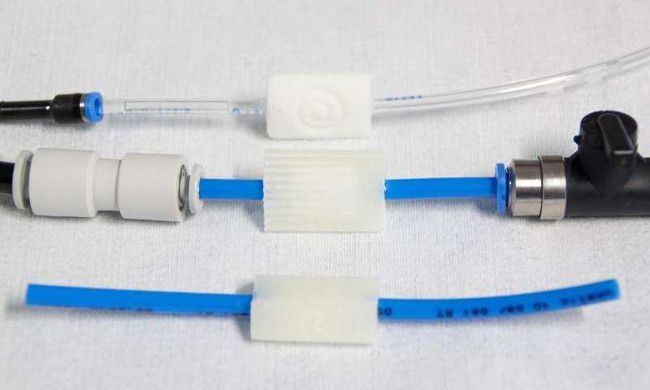
Каким же образом этому «червю» удается сверлить отверстие в сосцевидном отростке, обходя отдельные зоны? «Червь состоит из головы и хвоста», - объясняет Карстенсен. «Обе части соединены друг с другом посредством гибкого, гофрированного механизма». Конструкция напоминает сдвоенный автобус общественного транспорта, в котором передние и задние секции соединены с помощью центральной гофрированной части, которая выглядит как меха аккордеона.
Когда робот проходит сквозь кость, он подключен к внешним источникам питания и управления. В специальном помещении находятся насосы, к которым подключено от 8 до 12 гидравлических линий. Благодаря этим трубопроводам робот способен перемещаться в требуемом направлении. При этом первоначально гидравлической жидкостью накачиваются три камеры, находящиеся в задней части робота. Камеры заполняют пустое пространство между червем и костью и тем самым жестко фиксируют заднюю часть робота. Затем жидкость прокачивается через гидравлическую трубку в меха. Это приводит к расширению «гармошки», которая толкает голову вперед. Червь растягивается и прижимает переднюю часть к кости. Прикрепленное к головной части сверло начинает сверлить глубже. Затем задняя часть подтягивается к голове, как это делает настоящий червяк. При этом жидкостью заполняются камеры в передней секции, чтобы фиксировать головную часть, пока удаляется жидкость из задних камер. В этот момент жидкость через гидравлические линии также высасывается из мехов. Робот сокращается и тянет заднюю часть к передней. Таким образом, NiLiBoRo пробирается вперед, шаг за шагом.
«Мы можем изменить направление движения робота, регулируя объем камер в передней части. Например, если мы хотим, чтобы робот двигался влево, то заполняем левую камеру меньшим количеством жидкости, что будет вызывать поворот робота влево», - говорит Карстенсен.
В лаборатории, а потом и в операционном помещении, точность направления перемещения и сверления робота NiLiBoRo будет контролироваться с помощью электромагнитной системы слежения. Разработанная партнерами из Технического университета Дармштадта, эта система время от времени делает с использованием компьютерной томографии съемку изображения робота, чтобы отслеживать его позицию.
Исследователи уже собрали первый экспериментальный образец NiLiBoRo, который пока в пять раз больше, чем планируется в финальной версии. Сейчас он состоит только из передней части вместе с основной частью устройства – гофрированными мехами. Разработчики планируют продолжить оптимизацию и поэлементно дополнять прототип устройства. После того как технология будет полностью отработана, NiLiBoRo будет уменьшен до натуральной величины. Исследователи надеются подготовить миниатюрного робота к испытаниям в течение двух лет.
Комментарии
(0) Добавить комментарий