Возможно в будущем многие болезни можно будет лечить с помощью крошечных роботов, передвигающихся по кровеносной системе и доставляющих лекарства. Новейшие испытания такого рода медицинских машин провели исследователи из Института Макса Планка, которые ориентировались на поведение лейкоцитов, чтобы создать микророботов, способных двигаться против кровотока.
Эти устройства представляют собой стеклянные микрочастицы шириной менее восьми микрометров. Одна их половина покрыта тонким слоем никеля и золота, а другая несет на себе полезный груз. В этом тесте полезной нагрузкой были антираковые вещества, а также антитела, распознающие раковые клетки.
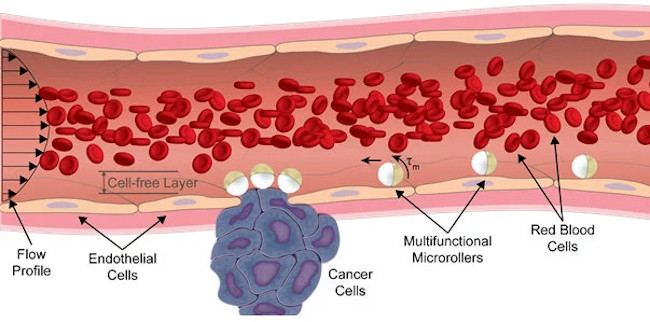
Вместо того, чтобы плавать в потоке крови, как другие микророботы, новые устройства двигаются, перекатываясь по стенкам кровеносных сосудов, как это делают лейкоциты, а направление их движения контролируется извне с помощью магнитного поля.
Исследователи провели лабораторное тестирование микророботов на имитационных моделях кровеносных сосудов и обнаружили, что силы, создаваемой магнитным полем, оказалось достаточно, чтобы тянуть роботов против тока крови. Скорость перемещения этих устройств составила до 600 мкм в секунду (76 длин корпусов в секунду), что делает их самыми быстрыми магнитными микророботами.
Комментарии
(0) Добавить комментарий