
Если в будущем крошечным роботам придется совершать фантастические путешествия по нашему телу, они должны знать, как преодолеть поджидающие их на пути коварные участки.
Инженеры из Университета Пердью разработали нового магнитного микроробота под названием microTUM, который перемещается с помощью кувырков и может карабкаться по возвышениям, преодолевать канавы во влажных или сухих условиях.
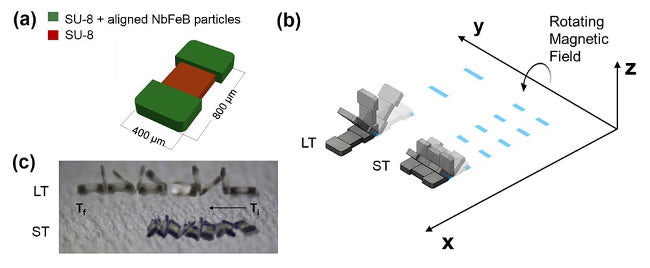
Микроскопический магнитный, кувыркающийся робот длиной 800 мкм и шириной 400 мкм (µTUM или microTUM) очень похож на Millirobot, созданный в институте Макса Планка. Обе машины имеют удлиненную форму с магнитами на концах, позволяющие управлять ими с помощью вращающегося магнитного поля. В средней секции можно перевозить лекарства или другие компоненты, чтобы доставить их в заданную точку организма.
«Робототехника в микро и нано-масштабе представляется одним из новых рубежей в области интеллектуальных систем автоматизации, - говорит Дэвид Каппелери, соавтор исследования, описывая µTUM. - В частности, в последнее время в качестве достойного кандидата для биомедицинских приложений стали рассматривать мобильных микророботов, благодаря их малым размерам, способностям к манипуляции и автономному движению».
Но организм человека представляет собой разнообразную и враждебную среду для робота. Силы трения на микроскопическом уровне могут затруднить его передвижение, а биологические жидкости добавить сопротивления.
Кувыркающие движения имеют решающее значение для мобильности µTUM. И не только потому, что требуют меньшей силы магнитного поля, но еще и потому, что робот всегда держит одну «ногу» на поверхности, благодаря чему он может взбираться на крутой склон.
«Способность подниматься вверх очень важна, поскольку поверхности в человеческом теле очень сложные, - говорит Мария Гикс, соавтор исследования. - Они бугристые и липкие».
В ходе работы µTUM в конечном итоге может найти применение для естественной доставки лекарств. Для этого команда планирует дать микророботу новое зрение на основе системы управления, чтобы направлять его более точно, и развивать немагнитную среднюю часть, чтобы нести полезную нагрузку.
Комментарии
(0) Добавить комментарий