Исследователи, открывшие недавно в знаменитой пирамиде Хеопса большие скрытые полости, объединили свои усилия с целью разработки новой роботизированной платформы для исследований и разведки.
В настоящее время основное внимание уделяется разработке двух роботизированных платформ, позволяющих заниматься поисками и созданием карт недоступных помещений без вскрытия дверей и разрушения стен. Проталкиваемый через маленькое отверстие в стене трубчатый робот проведет внутри обследование и сделает фотографии с высоким разрешением.
В состав проектирующей роботов специального назначения группы входят ученые из французского научно-исследовательского института Inria и CNRS (Национальный центр научных исследований), а также инженеры из Каирского университета и Института HIP из США. Их задача заключается в создании новой роботизированной платформы, способной исследовать внутренние помещения старых зданий и археологических сооружений, нанося при этом лишь незначительные повреждения постройкам.
Основная идея состоит в том, чтобы просверлить в стене или в двери маленькое отверстие диаметром 3,5 см. Исследователи проталкивают в отверстие трубчатого робота, который затем развертывает всенаправленную камеру с высоким разрешением, что позволит заглянуть в недоступные ранее места. Если осмотренное пространство представляется многообещающим для исследований, туда проталкивается второй робот через это же отверстие в стене.

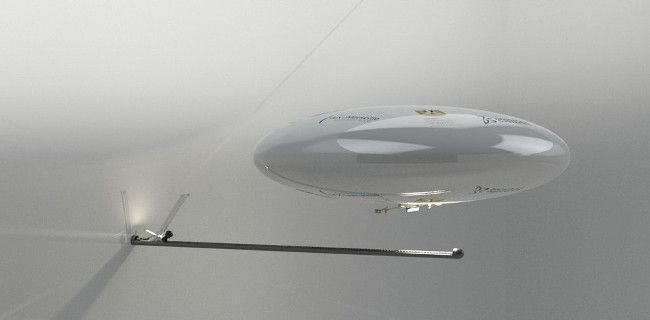
В качестве второго робота может быть самонадувной мини-дирижабль с упакованными датчиками, который мог бы исследовать скрытое пространство, составлять карты и собирать данные с привязкой к месту фотографий или видео. Все это без нанесения ущерба хрупкому зданию или памятнику.
Разработчики считают, что наземный робот встретит множество трудно преодолеваемых препятствий, таких как ступеньки, камни или мусор. А дистанционно контролируемый летающий робот сможет перемещаться без помех и быстрее, чем колесные роботы, обеспечивая при этом различные точки обзора.
По завершении своей миссии дирижабль вернется в док-станцию и выпустит воздух из оболочки, чтобы вернуться наружу через то же самое отверстие.
Пока еще нет конкретного плана по выбору очередного памятника для исследований с помощью таких роботов, но работы по созданию робо-платформ ведутся полным ходом.
Комментарии
(0) Добавить комментарий