Сорок одна миниатюрная автономная подводная лодка – это уже целая флотилия крошечных подводных роботов. Их в действительности настолько много, что управлять каждой по отдельности не имеет смысла. Гораздо перспективнее реализовать концепцию самоорганизованной группы (swarm – рой), где каждый робот действует автономно, а группа в целом решает поставленную задачу.
Финансируемый европейской комиссии проект CoCoRo (Коллективной когнитивной робототехники) разрабатывается с 2011 года. В рамках проекта ведутся исследования и разработки групп гетерогенных (разнородных) автономных подводных аппаратов (АПА). Самое важное, что нужно знать об этих роботах — то, что 20 из них называются Джефф.
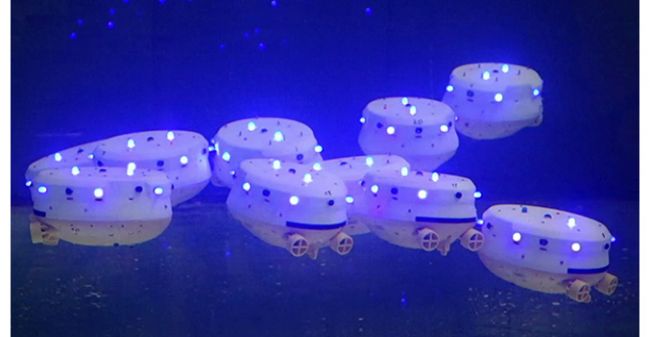
А вот этих скользящих в толще воды привлекательных, желто-белых робо-субмарин называют Лили. Кто-то скажет, что они просто очаровательны! Но изюминкой проекта является все-таки Джефф.
Это очень ловкий подводный робот. Мощная двигательная установка Джеффа позволяет ему плыть даже против течения, скорость которого может достигать 1 м/с. Роботы Лили более объемистые, поэтому в группировке они занимают верхний слой в воде, чтобы обеспечить взаимосвязь между роботами Джефф, базовой станцией и внешним миром.
Каждый АПА способен работать самостоятельно, члены небольших групп обмениваются сигналами друг с другом, а затем вся группа принимает решения на основе коллективных данных. Преимущества здесь такие же, как и в любой взаимосвязанной группе роботов. Это универсальная, гибкая, надежная и очень отказоустойчивая команда роботов. Вы можете потерять несколько Лили или Джефф, что будет, конечно, очень печально, но выполнение задания продолжится.
Специфический роевой тип поведения, который используют моделируемые роботы, присущ многим представителям животного мира. А именно, это могут быть рыбы, птицы, насекомые и даже простейшие формы в виде слизи, что выглядит очень впечатляюще.
Излучая и принимая импульсные световые сигналы, группа роботов Лили может собраться в стаю или рассредоточиться. Подобно простейшим микроорганизмам или светлячкам, такие импульсные сигналы передаются от одного робота к другому, образуя сигнальные волны, которые перемещаются через весь рой роботов. Исследователи использовали такие волны, чтобы удерживать роботов Лили вместе, координировать группу и перемещать ее в нужном направлении.
С точки зрения практического применения, один из возможных сценариев включает в себя подводный поиск, когда роботы Джефф расплываются в разные стороны в поисках цели, общаясь при этом по линиям связи друг с другом. Когда цель обнаружена, на помощь вызываются роботы Лили для установления связи с поверхностью.
Комментарии
(0) Добавить комментарий