В начале октября компания ARDN Technology (российский бренд — ОКБ “Авиарешения”) побывала на выставке Drone World Expo в Сан-Хосе и представила там свою разработку — беспилотную авиагрузовую платформу SKYF.
Маркетинговые исследования "Текарт" в области робототехники:
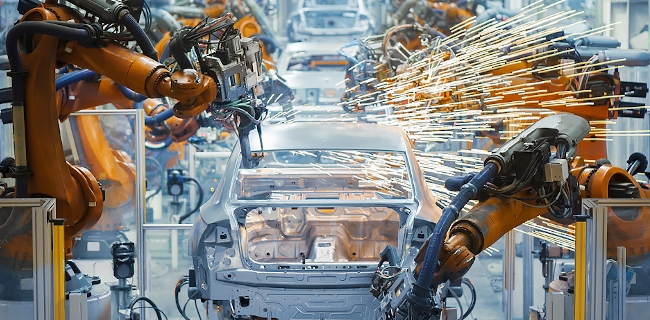
Перспективы производства промышленных роботов в России
Пандемия ускоряет цифровую трансформацию и автоматизацию бизнеса, стимулируя интерес инвесторов и предпринимателей к робототехнике.
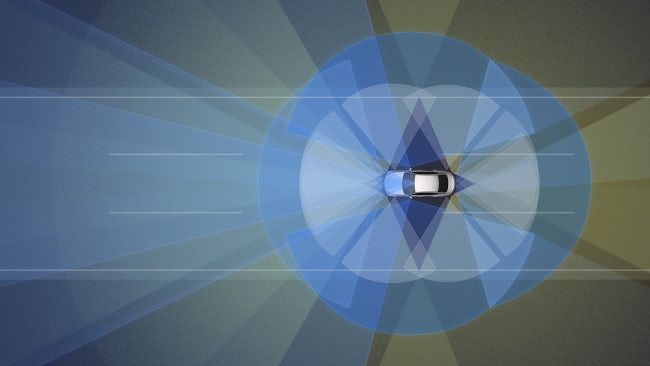
Анализ рынка устройств визуализации с подавлением засветки
Аналитиками «Текарт» завершен проект, посвященный анализу рынка устройств визуализации, оснащенных функцией компенсации встречной засветки.
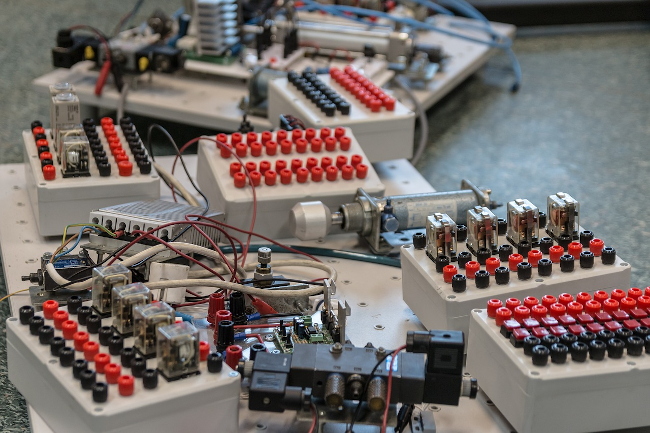
Обзор рынка промышленной автоматики
Департаментом маркетингового анализа «Текарт» завершен проект, посвященный анализу рынка промышленной автоматики (системы АСУ ТП и КИПиА) в Воронежской области. В рамках исследования была определена потенциальная емкость рынка промавтоматики, оценена структура спроса в разрезе основных отраслей потребителей, выявлены крупнейшие потребители промавтоматики в фокусном регионе.

Маркетинговое исследование рынка робототехники
Объектом исследования является российский рынок робототехники. Рынок робототехники делится на два значимых сегмента: бытовые (домашние роботы) и роботы профессиональные (промышленные/сервисные). В данном маркетинговом исследовании рассматривался именно сегмент профессиональных роботов.