Намереваясь сделать более доступной разработки на базе технологий локализации и отображения (SLAM), Google выкладывает в открытый доступ свою библиотеку Cartographer для работ по картографированию окружающего пространства в форматах 2D и 3D.
SLAM, конечно же, является одним из важнейших компонентов для роботов-пылесосов, БПЛА, автономных транспортных средств и других автономных платформ. Алгоритмы SLAM объединяют данные от датчиков для определения их позиций и создания карты окружающей среды. Например, возьмем робота iRobot Roomba. Очищая пол, он использует датчики и камеры для отображения среды в помещении.
«В настоящее время Cartographer ориентирован, в первую очередь, на лазерные датчики (LIDAR SLAM), - отмечает Google. - Последующее развитие совместно с другими участниками рынка, мы надеемся, добавит поддержку большего числа датчиков и платформ, а также новые функции, включая постоянное отображение и локализацию на уже существующей карте».
Cartographer интегрируется с операционной системой для роботов (ROS) и уже совместим с рядом робототехнических платформ, включая Toyota Human Support Robot (HSR), TurtleBots, PR2 и Revo LDS. Джеймс Куфнер, технический директор Научно-исследовательского института Toyota, подробно рассказал о HSR во время своего выступления на сентябрьской конференции RoboBusiness 2016, заявив что платформа станет стандартом к июльскому симпозиуму RoboCup 2017 в Нагое, Япония.
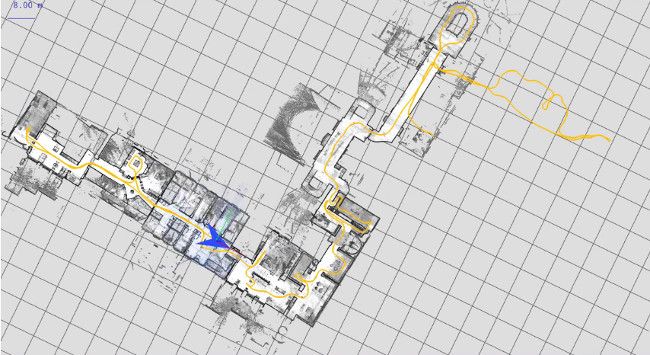
Google сообщает об открытом доступе к собранным за три года данным на основе лазерных и инерциальных датчиков, полученным с помощью платформы на базе рюкзака для 2D и 3D отображения, созданной во время разработки и тестирования Cartographer.
Google представила Cartographer в 2014 году как инструмент картографирования в рюкзаке для использования внутри помещений. Человек с таким рюкзаком просто гуляет по любому зданию и план каждого этажа автоматически генерируется в режиме реального времени. В дополнение к рюкзаку можно также использовать приложение для добавления интересующих зон во время прогулки вокруг здания.
Комментарии
(0) Добавить комментарий