Роботы становятся все меньше, дешевле и совершеннее, так что часто целесообразнее вместо одного большого использовать сразу массу маленьких роботов, известных также как «роящиеся» (swarm) роботы. А когда парк таких роботизированных аппаратов расширяется и усложняется, чрезвычайно важными становятся интуитивно понятные методы управления в режиме реального времени.
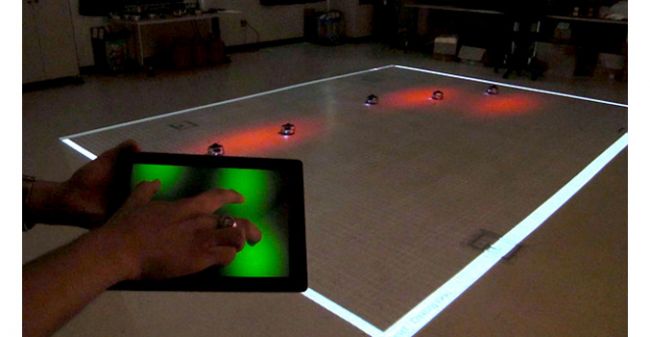
В лаборатории GRITS Технологического института Джорджии разработали метод динамического управления большими группами роботов, используя для этого лишь планшет и палец (или два пальца).
«Человек не может управлять индивидуально каждым из тысяч или миллионов роботов, программировать алгоритм действий для каждого из них», - сказал Магнус Эджерстед, профессор Школы электротехники и вычислительной техники в Технологическом институте Джорджии. «Вместо этого, оператор указывает область, которую необходимо исследовать. Затем роботы совместно определяют оптимальные способы выполнения задания».
Роботы, как правило, довольно хорошо определяют эффективные способы решения задач, но они гораздо хуже приспосабливаются к изменениям и выбору необходимой для решения в первую очередь задачи, особенно, если им предстоит принимать эти решения оперативно. Здесь и приходит на помощь система Технологического института Джорджии, когда даже начинающий пользователь может назначить цели, просто тыкая пальцем в планшет, и роботы начнут, координированно взаимодействуя, решать поставленную задачу.
Используемый сценарий действия этой системы был первоначально разработан для поисково-спасательных работ в зоне катастроф, когда имеется обширная территория с пересеченным рельефом, которую нужно оптимальным образом обследовать. Роботы хороши тем, что могут решать задачи оптимально и у них не возникает проблем в совместном обследовании области поиска. Между тем, человек может определить представляющие интерес области и задать их в качестве целей для группы роботов. После того, как новая цель назначена, роботы перемещаются на основе алгоритма, который гарантирует оптимальный охват, без активного участия человека. Вот пример действующей системы:
Последние научные исследования во многом аналогичны, за исключением того, что есть динамически выбираемые оператором области, на которые роботы должны обратить особое внимание.
По мнению исследователей, этот вид контроля также может оказаться очень полезным в коммерческих условиях. Роботы для очистки, роботы для наблюдения, БПЛА для доставки заказов и прочее. В действительности, любая система на основе множества роботов, которой необходимо адаптивно исследовать область территории, может извлечь выгоду из подобного интерфейса. Эта технология действует эффективно, особенно в случае, если у вас нет опыта работы с роботами и понимания сути поставленной задачи. Это прекрасная система управления роботами.
Комментарии
(0) Добавить комментарий