Разработанная в Массачусетском технологическом институте (MIT) новая система обучения роботов улучшает их возможности по приданию разным материалам заданных форм и прогнозированию взаимодействия с твердыми объектами и жидкостями.
Эта система, известная как имитатор частиц на основе обучения, может обеспечить промышленным роботам более аккуратное касание, а домашние роботы могут найти забавные применения: например, моделирование глиняных фигур или раскатывание риса для суши.
Физические симуляторы в роботизированном планировании – это модели, которые фиксируют реакцию различных материалов на физическое воздействие. Роботы «обучаются» с помощью моделей, чтобы предсказать результаты их взаимодействия с объектами, например, толкать твердую коробку или тыкать деформируемую глину. Но использующие обучение традиционные симуляторы в основном фокусируются на твердых объектах и не способны работать с жидкостями или мягкими телами. Некоторые более точные физические симуляторы могут работать с разными материалами, но в значительной степени полагаются на методы аппроксимации, которые вносят ошибки, когда роботы взаимодействуют с объектами в реальных условиях.
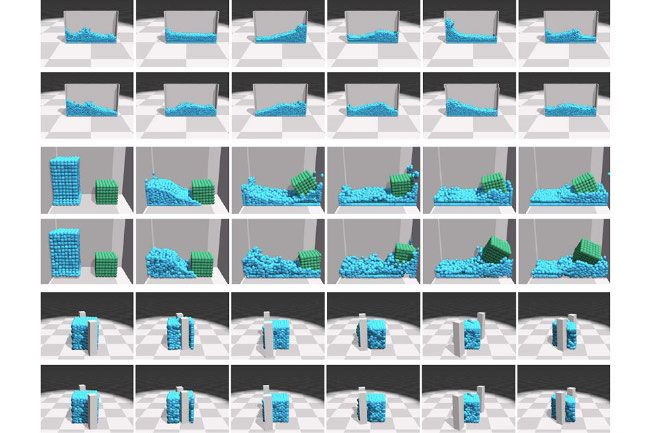
Исследователи описывают новую модель, которая учитывает, как маленькие порции различных материалов («частиц») взаимодействуют, когда их тыкают и толкают. Модель напрямую учится на данных в тех случаях, когда основная физика движений неопределенна или неизвестна. Затем роботы могут использовать модель в качестве руководства, чтобы предсказать, как жидкости, а также жесткие и деформируемые материалы будут реагировать на усилие прикосновения. Поскольку робот обрабатывает объекты, модель обучения также помогает улучшить управление роботом.
В экспериментах роботизированная рука с двумя пальцами, называемая «RiceGrip», точно придавала деформируемой пене желаемую конфигурацию. Короче говоря, модель служит своего рода мозгом «интуитивного интерфейса», который роботы могут использовать для реконструкции трехмерных объектов, что похоже на действия людей.
Комментарии
(0) Добавить комментарий