Любой беспорядок представляет для роботов особую проблему, однако новое программное обеспечение Университета Карнеги-Меллона помогает роботам c ним справляться. При этом не важно, прокладывают ли они путь на поверхности Луны или извлекают пакет молока из холодильника.
Это программное обеспечение не только помогает роботам эффективно преодолевать беспорядок, оно неожиданно выявляет творческий потенциал роботов при решении сложных задач.
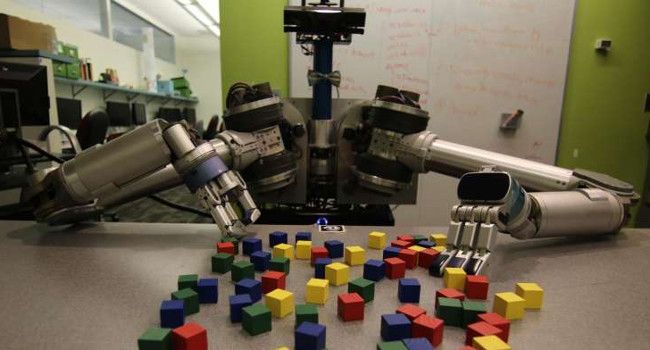
«Это можно назвать своего рода сверхчеловеческими способностями, - говорит старший доцент робототехники Сиддхартха Сриниваса о роботе HERB (Home Exploring Robot), - Запястье руки робота имеет диапазон действия в 270 градусов, что привело к поведению, которого мы не ожидали от него. Однажды робот использовал изгиб своего манипулятора, как рычаг для перемещения объекта. Мы никогда не учили его этому».
Это программное обеспечение было протестировано не только с HERB, но и с созданным в NASA роботом KRex, который разрабатывается для путешествий по лунной поверхности. Если HERB ориентирован на типичный для домашней обстановки беспорядок, то KRex использовал программное обеспечение для того, чтобы найти путь через заполняющие пейзаж перед ним препятствия, перемещая их.
Сегодняшние роботы имеют большой опыт работы по перемещению объектов, подбирая их и перемещая в заданное место. Сриниваса отметил, что этот опыт с успехом применяется на производственных линиях, где нет особого беспорядка. Совсем в другой ситуации окажутся роботы, когда они приземлятся на далеких планетах или когда роботы-помощники наконец появятся в наших домах.
Когда человек достает пакет молока из холодильника, ему не обязательно перекладывать все мешающие ему при этом продукты. Скорее всего, он может переложить одну или две упаковки, распихивая другие, мешающие достать пакет молока.
Планировщик перегруппировка автоматически находит баланс между этими двумя стратегиями. Робот имеет представление о базовых законах физики, поэтому он имеет некоторое представление о том, что можно толкать, поднимать или на что можно наступить. И его можно научить обращать внимание на разные объекты при выполнении задачи.
Одним из ограничений этой системы является то, что как только робот оценил ситуацию и разработал план, чтобы переместить объект, он эффективно выполняет намеченное. Сейчас ведется работа, чтобы обеспечить также тактильную и другую обратную связь, что может обеспечить коррективы в действиях робота в случае изменения ситуации или ошибки в расчетах.
Комментарии
(0) Добавить комментарий