На Международной конференции ACM/IEEE по взаимодействию человека и робота (HRI), прошедшей в этом месяце, исследователи из Корнельского университета и университета Беркли представили разработанный алгоритм, который позволяет роботу вести себя «как человек» в ситуации, когда он не в состоянии выполнить поставленную задачу.
Если роботу не удается что-то сделать, то вместо того, чтобы беспомощно и неподвижно сидеть, будет гораздо лучше, если робот сможет в простой и доступной форме, например, с помощью жестов, сообщить, что он хочет сделать и почему у него это не получается.
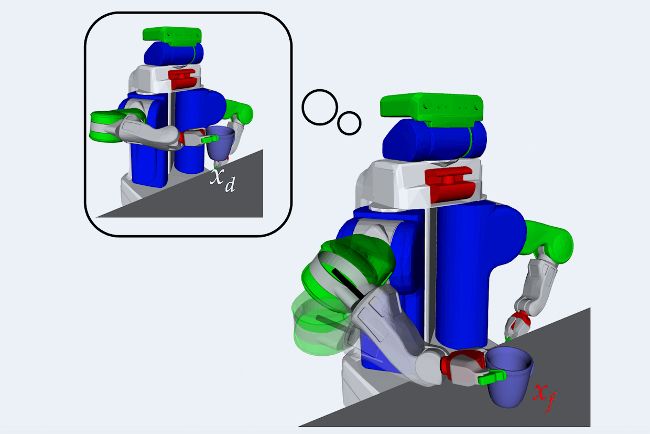
Вот как объясняют исследователи особенности своей работы. Ключевой момент заключается в том, что робот может выразить и то, что он хочет сделать, и то, почему он не в состоянии это сделать, путем решения задачи оптимизации. В качестве примера возьмем поднятие чашки, которая слишком тяжелая, или поворот крана, который заклинило. Когда робот «понимает», что он не способен выполнить задачу, он будет искать некоторое движение, которое передает суть задачи и причину неспособности ее выполнения. Движение, «проливающее свет на причину нетрудоспособности» робота, интуитивно представляет неопытному наблюдателю то, что робот собирается делать и почему он терпит неудачу. В принципе, робот превращается в мима, делая преувеличенно выразительные движения, передающие намерение.
Эти выразительные движения генерируются полностью автоматически, а не по заданному заранее сценарию. По сути, это оптимизационная задача, которую робот решает непривычным способом: вместо того, чтобы вернуться в исходное положение и начать производить все действия снова, робот в случае своей неудачи будет повторять лишь отдельное движение, близкое по траектории к предыдущему, до момента, когда он не может продолжить выполнение задачи. Если взять пример с тяжелой чашкой, которую робот не может поднять, то он продолжит ее дергать, а не опустит «руку» и снова возьмет чашку.
Однако, этот метод работает только для ограниченного набора задач, и пока не может эффективно решать все остальные причины неудач робота.
Комментарии
(0) Добавить комментарий