Большая часть компонентов сегодняшних роботов выполнены из жестких материалов, имеют ограниченный диапазон перемещения и, на самом деле, выглядят не очень реалистично. Новый роботизированный палец, созданный по природному образу и биологическому подобию ученым из Флоридского Атлантического университета, выглядит и действует как настоящий.
В статье, опубликованной недавно в журнале Bioinspiration & Biomimetics, Эрик Энджеберг, доктор философии, доцент на кафедре Океана и машиностроения, описывает процесс разработки и испытаний этого роботизированного пальца, который создан из сплава с эффектом памяти (СЭП). При этом использовалось 3D-моделирование человеческого пальца, технология 3D-печати и уникальная технология термотренировки.
«Мы смогли выполнить термомеханическую тренировку нашего роботизированного пальца, чтобы имитировать такие движения человека пальцем, как сгибание и разгибание», - сказал Энджеберг. «Благодаря малому весу, маневренности и силе, наша роботизированная конструкция имеет огромные преимущества по сравнению с традиционными механизмами, и, в конечном счете, может быть адаптирована для использования в качестве протеза, например, протеза руки».
В исследовании Энджеберга и его команды использован резистивный нагревательный процесс, который включает прохождение электрического тока через проводник, который испускает тепло. Используя готовую модель человеческого пальца, созданную в программе 3D CAD, они смогли создать реальную модель пальца. С помощью 3D-принтера они создали внутренние и внешние формы, которые вмещают привод сгибателей и разгибателей и датчик положения.
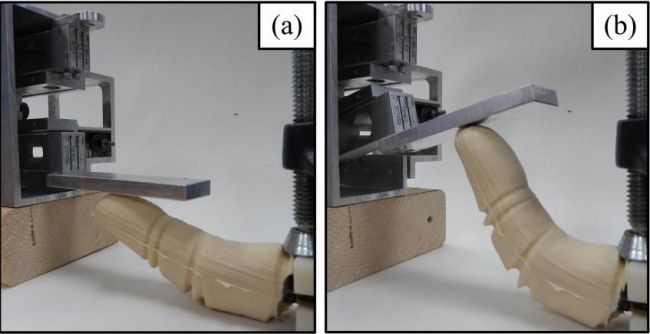
Привод разгибателей принимает прямую форму, когда он нагревается, в то время как привод сгибателя при нагревании изгибается. Для того, чтобы собрать палец, они использовали материал СЭП и многоступенчатый процесс литья. Разработанная электрическая конструкция обеспечивает протекание электрического тока через каждый привод. U-образная конструкция направляет электрический ток к элементам СЭП от источника в основании пальца.
Чтобы управлять роботизированным пальцем, новая технология использует вначале нагрев, а затем процесс охлаждения. Когда привод охлажден, материал несколько ослабевает. Результаты исследования продемонстрировали более быстрое сгибание и разгибание пальца, а также его способность к более точному и более полному восстановлению термотренированной формы.
Поскольку первоначально планируется использовать этот палец в подводных работах, Энджеберг использует теплоизоляторы на кончике пальца, которые открыты, чтобы облегчить протекание воды внутрь пальца. Когда палец согнут или разогнут, вода протекает через внутреннюю полость внутри каждого изолятора для охлаждения приводов.
«Наш роботизированный палец стабильно восстанавливает термотрениванную форму, делая это лучше, чем другие подобные технологии, а подводные эксперименты ясно показали, что использование для охлаждения воды значительно увеличивает скорость движений пальца», - сказал Энджеберг.
Новая технология Энджеберга сможет помочь решить некоторые проблемы и задачи, с которыми люди сталкиваются во время работы в глубинах океана.
Комментарии
(0) Добавить комментарий