Своеобразный способ, которым передвигается этот, напоминающий гусеницу, робот может быть не столь быстрый, по сравнению с использованием ног, крыльев или колес, но он дает преимущество, когда дело доходит до маневрирования в ограниченном пространстве. Это одна из причин, почему исследователи разработали и создали мягкого червеобразного робота, который перемещается подобно гусенице, подтягивая и поднимая тело вверх, а затем продвигая его вперед. Такие роботы в последующем могут использоваться в спасательных и разведывательных работах в недоступных для человека или больших роботов местах.
Исследователи из Сеульского национального университета опубликовали в недавнем выпуске журнала Bioinspiration & Biomimetics свою статью о роботе в стиле гусеницы бабочки пяденицы.
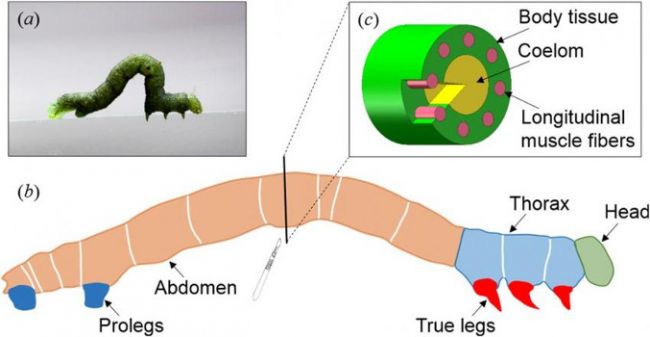
В природе гусеница бабочки пяденицы, известная также как землемер, имеет длину от двух до пяти сантиметров. Небольшой зеленый червяк имеет две или три ноги в передней части, на заднем конце также две или три ноги, но они недостаточно развитые и называются ложными. Хотя, как и все гусеницы, они не имеют костей, но сложные системы мышц позволяют им выполнять разнообразные движения тела, в том числе стоя вертикально на задних ложных ножках.
Чтобы имитировать перемещение в стиле этой гусеницы, исследователи использовали мягкие, гибкие силиконовые материалы (Polydimethylsiloxane – PDMS). Исследователи создали форму гусеницы, используя 3D принтер, а затем залили в форму PDMS. Затем они приклеили небольшие кусочки полиамидной пленки, чтобы сделать ноги на передней и задней конечности. Для имитации мышечных волокон исследователи использовали восемь продольных жгутов из сплава с памятью формы (SMA), которые проходят по всей длине тела робота.
Подавая на волокна с SMA электрический ток, исследователи могли заставить тело робота двигаться подобно гусенице. Использование для подачи тока симметричных волокон приводит к линейному перемещению. Активация асимметричных волокон приводит к деформации и повороту с использованием одной ноги в качестве якоря.
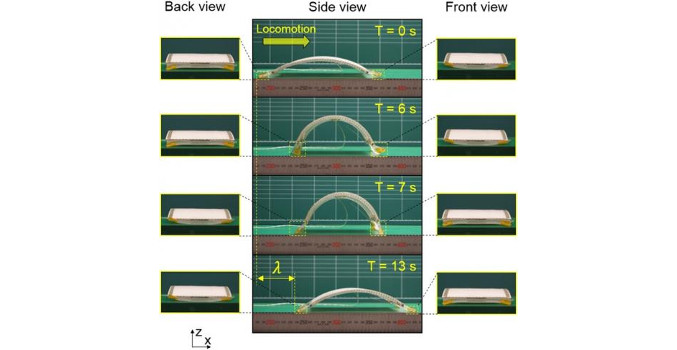
Испытания показали, что длина шага робота достигает 54 мм, что составляет около одной трети от длины тела, он передвигается со скоростью около 3,6 мм / с. Поворот выполняется медленнее и сложнее, требуется 21 шаг, чтобы завершить полный поворот на 90 градусов. Тем не менее, это уже успех, по сравнению с предыдущими подобными роботами.
Кроме того, этот гусеничный робот простой, легкий и бесшумный. Эти особенности делают его полезным не только для спасательных и разведывательных миссий, но и как потенциальный материал для умных структур и носимых устройств. В будущем исследователи планируют сосредоточиться на совершенствовании мобильности робота с помощью независимой системы управления.
"Мы хотим применить этот алгоритм движения и управления к другим роботам на основе двигателей, чтобы сделать тихие и гибкие устройства, но с большой грузоподъемностью", - сказал соавтор разработки Сун Хун Ан, профессор Сеульского национального университета. "Мы также хотим использовать нашу интеллектуальную технологию мягких композитных материалов в таких типах механизмов, как мягкие протезы, мягкие электронные приборы, автомобили-трансформеры и т.д."
Комментарии
(0) Добавить комментарий