Все, кому часто приходится иметь дело с роботами, осведомлены о их низкой живучести. Такие роботы, как Gimball компании Flyability, способны преодолеть этот недостаток за счет использования сетчатого защитного каркаса. Такого рода каркас мог бы защитить и наземных роботов, хотя это сложнее, поскольку использование полного каркаса затрудняет для них выполнение каких-либо задач.
На выставке IROS, японские исследователи представили оригинального робота QRoSS, которого можно без каких-либо последствий забросить к месту действия, он может катиться как колобок по земле, а затем способен подняться на четыре ноги, когда нужно перемещаться по пересеченной местности.
Насколько хорошие ходоки такие реальные роботы? Основная разница между роботом QRoSS и, например, шаром-трансформером MorpHex состоит в том, что QRoSS использует систему передвижения, которая полностью не зависима от внешней оболочки. Большим преимуществом является то, что оболочка действует как пассивный амортизатор, что позволяет роботу кататься (или можно бросать его), не опасаясь повреждений.
Например, находясь в районе бедствия, человек может забросить робота, как бейсбольный мяч, в опасную зону из безопасного места. И после нескольких отскоков у QRoSS просто «отрастают» ноги и он начинает ходить. Ноги великолепно помогают преодолевать пересеченную местность, а конструкция QRoSS позволяет использовать при необходимости ноги абсолютно не беспокоясь о том, насколько они хрупкие, так как после любого проскальзывания или падения робот начинает использовать метод передвижения колобка.
Другим преимуществом данного робота является то, что он может использовать прокатывание, как быстрый и более эффективный метод передвижения, пока поверхность ровная. QRoSS имеет скорость ходьбы около 0,1 м/с, а скорость прокатывания почти 0,6 м/с.
QRoSS II (текущая версия) весит почти 2,5 кг, с оболочкой диаметром 30 сантиметров, так что он пока еще не оптимизирован для метания. Исследователи до сих пор изучают методы мобильности и характеристики, поэтому они, на самом деле, не уделяют должного внимания размеру, весу или стоимости. Тем не менее, конструкция представляется масштабируемой и нет никаких оснований думать об очень высокой себестоимости изготовления.
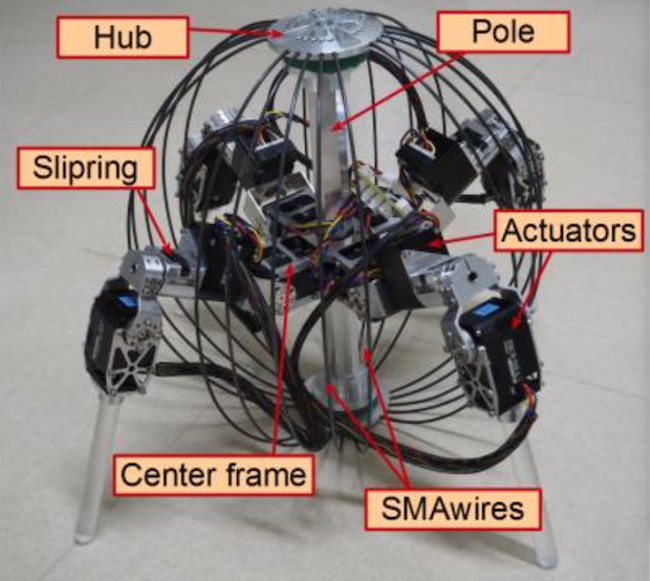
Сейчас в конструкции робота использованы двенадцать сервоприводов (по три на одну ногу), немного электроники и ноги, изготовленные из комбинации титана и сплава с эффектом памяти формы, c пенополиуретановым амортизатором. Вероятно, будущие варианты смогут быть уменьшены (до размеров ладони), и станут достаточно доступными, как предметы одноразового использования, выбрасываемые там, где они могут быть необходимы.
Комментарии
(0) Добавить комментарий