Многоножки известны своим быстрым перемещением. И когда она движется прямо на вас, ее ловкость невольно настораживает и поражает. Исследователи из Киотского университета задались вопросом, почему многоножки двигаются с такой ловкостью даже через препятствия. Они использовали компьютерное моделирование, а затем и робототехнику, чтобы найти ответ.
В результате они обнаружили удивительную механику передвижения, а именно, использование эффекта неустойчивости. Этот фактор, который должен быть недостатком, является ключом к успеху у многоножки.
«В процессе передвижения несколько ног имеют контакт с землей, чтобы поддерживать тело и противостоять силе тяжести, а также, чтобы обеспечивать толкающие и тормозящие усилия, - объясняет ведущий исследователь Шинья Аой, - Эти ноги физически связаны с плоскостью, что может препятствовать маневренности передвижения». Но многоножки преодолевают эти ограничения, задействуя фактор неустойчивости в процессе характерного волнистого перемещения тела.
Группа разработала математическую модель многоножки и обнаружила, что передвижение по прямой представляется неустойчивым. А волнообразные движения тела становятся предпочтительными, изменяя скорость и положение осевой линии тела многоножки.
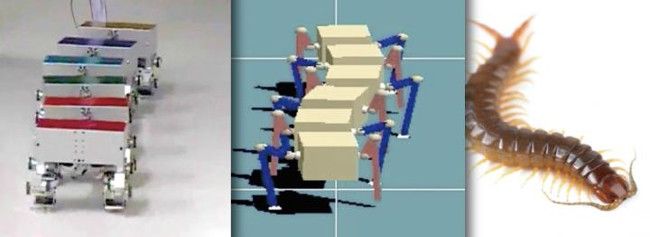
C компьютерными моделями, а затем и с сегментированными, многоногими роботами команда смогла повторить движения многоножки, в том числе волнообразные движения тела. Но Аой и его коллеги не довольствуются простым укрощением этих жутких ползающих существ.
«Это исследование дает ключ к разгадке нерешенных вопросов интеллектуальных двигательных функций животных и к осмысленному пониманию биологических наук». При том многое еще остается неизвестным в точной механике такого передвижения, эти исследования могут привести к совершенствованию перемещения роботов, независимо от того, сколько ног у них может быть.
Комментарии
(0) Добавить комментарий