Мягкие роботы многое могут, но известно, что они не отличаются скоростью. Искусственные мышцы, которые перемещают мягких роботов, называют приводами. Как правило, они выполнены на основе гидравлики или пневматики, которые достаточно медленно реагируют и требуют громоздкого оборудования для хранения энергии.
Диэлектрические эластомеры – мягкие материалы с хорошими изоляционными свойствами могли бы стать альтернативой пневматическим приводам. Но они в настоящее время используют сложную и неэффективную схему для подачи высокого напряжения, а также жесткие компоненты для поддержания их формы. Оба требования сводят на нет преимущества мягких роботов.
Однако недавно исследователи из Гарвардского университета разработали диэлектрический эластомер с широким диапазоном перемещения, требующий относительно низкого напряжения и без жестких компонентов.
Электричество легко хранить и доставлять, но до сих пор не было возможности обеспечить достаточно высокий уровень электрического поля, необходимого для силовых приводов в мягких роботах. Данное исследование решает массу проблем мягкого привода за счет снижении напряжения срабатывания и увеличения плотности энергии, при одновременном устранении твердых компонентов.
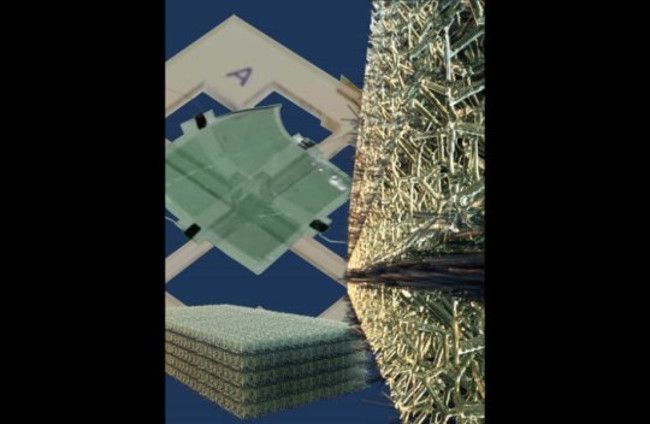
Для создания нового диэлектрического эластомера используется сочетание двух материалов, которые хорошо работают и по отдельности. Эластомер на основе разработанного в Калифорнийском университете материала устраняет необходимость в жесткой компоненте, а электроды из углеродных нанотрубок были разработаны в лаборатории Кларка. Дополнительные свойства этих двух материалов позволили создать новое устройство, превосходящее стандартные приводы с диэлектрическими эластомерами.
Большинство диэлектрических эластомеров имеют ограниченный диапазон перемещения, должны быть предварительно растянуты и прикреплены к жесткому каркасу. Разработанный в Калифорнийском университете эластомер не требует предварительного натяжения и представляет собой модифицируемый материал в виде жидкости, которая может быстро отвердевать под воздействием УФ света в виде тонких как бумага листов. Они липкие, как двухсторонний скотч, так что могут хорошо прилипать друг к другу и к электродам.
В качестве электродов исследователи использовали слой тонких углеродных нанотрубок вместо графитовой смазки, которая обычно используется в качестве электрода в диэлектрических эластомерах. Нанотрубки не увеличивают жесткость эластомера и не уменьшают плотность энергии – таким образом, эластомер может растягиваться и обеспечивать значительную силу. Созданные приводы представляют собой многослойную конструкцию из эластомера и электродов, каждый электрод используется для управления верхним и нижним слоем эластомера.
Приводы подобного типа могут найти повсеместное применение от носимых устройств с мягкими захватами до лапароскопических хирургических инструментов, полностью мягких роботов и искусственных мышц в более сложной робототехнике. Как заявляет один из авторов исследования: «Создание приводов является одной из наиболее сложных задач в робототехнике. Этот прорыв в электрически управляемых мягких приводах гораздо ближе к мышцам по производительности для механических систем и открывает двери для многочисленных применений в мягкой робототехнике».
Комментарии
(0) Добавить комментарий