Кажется, что все способы передвижения роботов уже изучены. И, тем не менее, периодически появляются оригинальные и порой забавные новинки. Вот еще одна из них. Самый быстрый робот, движущийся подобно гусенице или как червь, способен перемещаться в любом направлении, используя при этом только один электродвигатель. Робот получил название SAW или Single-Actuator Wave и был создан Давидом Зарруком.
Гусеница при движении похожа на перемещающуюся синусоиду, также движется и SAW. Причем, в мире животных используемый вариант синусоидальной волны может быть разным. Используемый SAW вид волны (поперечная волна) гораздо более распространен среди морских обитателей, а также у микроорганизмов. Привлекательность этой конструкции в том, что она обеспечивает очень простое движение, которое показывает высокую эффективность. Хотя выяснить это было довольно сложной задачей.
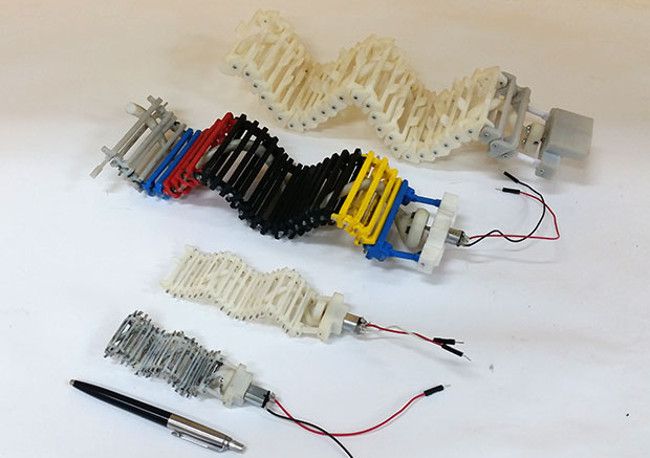
Конструкция SAW проста, как и все гениальное. Один двигатель вращает жесткую спираль («позвоночник» робота), который встроен в ряд жестких 3D-печатных пластиковых связей, способных изгибаться в одном измерении и в чем-то похожих на велосипедную цепь. По мере вращения спирали отдельные элементы вертикально двигаются вверх и вниз. Когда они касаются поверхности, то, отталкиваясь, они продвигают робота вперед.
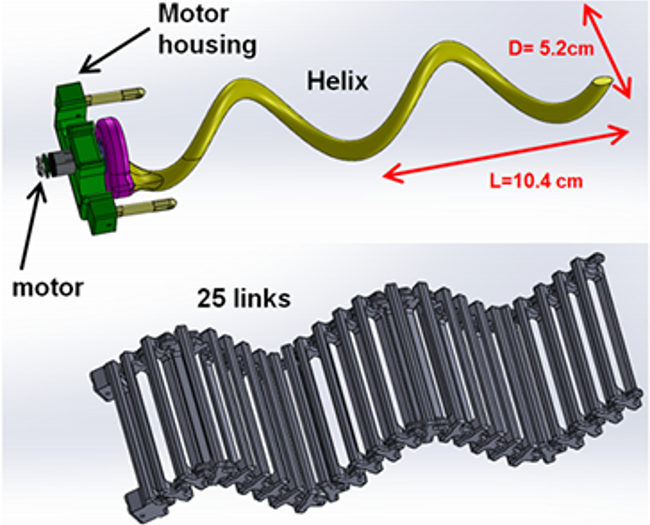
Так как метод привода SAW работает только в одном измерении (может двигать конструкцию вперед и назад), необходимы также колеса, чтобы менять направление движения. Самая большая версия робота имеет максимальную скорость 57 см/с.
Текущей вариант конструкции робота очень простой в сборке, легкий, быстрый, эффективный, прочный и легко изменяемый в размерах как в большую, так и в меньшую сторону. Заррук сказал, что робот «практически не требует никакого ухода», что очень необычно для почти полностью 3D-распечатанного динамичного прототипа. Для дальнейшего совершенствования имеется еще много возможностей. Рулевое управление не самое элегантное, поэтому исследователи планируют соединить вместе два SAW через шарнирное соединение.
Возможно, самая большая задача – разработать способ изменения шага и амплитуды волны в процессе движения. Это позволит роботу адаптироваться к различному рельефу и более эффективно лазить по трубам разного диаметра. Предполагается дальнейший анализ передвижения робота по мягким и скользким поверхностям, а также в загрязненных водах. В дальнейшем возможно достаточно серьезное уменьшение размеров робота, чтобы можно было использовать его для съемок и взятия проб в кишечнике.
Комментарии
(0) Добавить комментарий