Когда человек поднимает руками грузы, он использует тактильную обратную связь, чтобы автоматически регулировать свои усилия в соответствии с массой поднимаемого объекта. Совершенно разное сцепление требуется для удержании мягкого фрукта и стеклянного украшения. Ваша рука будет автоматически регулировать сцепление, используя для этого ощущения в подушечках на кончиках пальцев. Оснащение роботов захватами подобного уровня до сих пор остается проблемой.
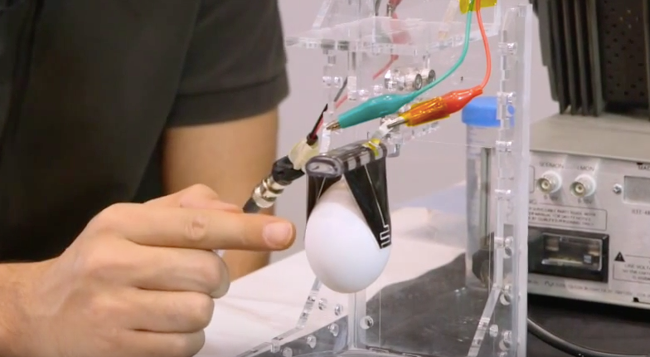
Однако в статье, недавно опубликованной на ресурсе Advanced Materials, объединенная группа исследователей из разных компаний (LMTS, LIS, EPFL и NCCR Robotics) предлагает решение с простым управлением, которое было использовано для захвата разнообразных объектов, включая сырые куриные яйца, баллон с водой и плоский лист бумаги.
В то время, как большинство роботов имеет захваты, предназначенные для подбора определенного типа объектов, эта двухпальцевая версия отличается универсальностью за счет способности максимизировать электроадгезивные и электростатические свойства самонастраиваемых изгибаемых приводов из диэлектрического эластомера (DEA). Электроадгезивная сила обеспечивают удерживающее усилие, чтобы захватить тяжелые объекты, и минимизирует требуемое механическое, зажимающее усилие, генерируемое электростатическим приводом, позволяя захватам работать с очень хрупкими и деформируемыми объектами при большом разнообразии их форм.
Ключевой новинкой, которая позволяет этому новому захвату вести себя по-разному, является расположение электродов на пластинах из гибкого эластомера. Традиционно при функционировании DEA тонкая мембрана эластомера зажата между двумя параллельными электродами. При подаче напряжения на мембрану противоположные заряды на электродах создают электростатическое давление, которое приводит к уменьшению толщины и изгибу привода.
Для приведения в действие эластомерной пластины электрические поля внутри мембраны действуют, как правило, перпендикулярно к поверхности. Но они не единственные. Внешние электрические поля, создаваемые на краях электрода, могут воздействовать на ближайшие объекты.
Для того, чтобы использовать электроадгезию и электростатическое действие DEA, эластичные электроды переплетены таким образом, что приводят к размещению соседних сегментов электродов на плоской поверхности с противоположной полярностью к ближайшему. Таким образом, когда прикладывается напряжение, то боковые электрические поля действуют по всей DEA, а не только по краям, что приводит к увеличению усилий электроадгезии в десять раз.
Простая конструкция захвата позволяет сделать его легким (около 1,5 г), он быстро действует (около 100 мс для сжатия), может быть использован в разных системах, включая небольшие транспортные дроны, роботы для пищевой промышленности и медицины.
Комментарии
(0) Добавить комментарий