После важного достижения в университете Линкольна, Великобритания, в настоящее время стала доступна для исследователей в области робототехники и искусственного интеллекта инновационная, эффективная и недорогая система, которая позволяет воспроизводить среди роботов основанные на ферромонах принципы взаимодействия в рое насекомых.
Роевые принципы в робототехнике относятся к новым подходам в управлении системами с несколькими роботами. Подсмотренные в природе принципы позволяют изучить возможности для улучшения взаимодействия между роботами и окружающей средой.
Проведенные в последние годы исследования в этой области имели важное значение для понимания взаимодействия среди таких насекомых, как муравьи, известные своим роевым поведением. Эти исследования также способствовали разработке высокоточных датчиков для предотвращения столкновений транспортных средств, технологии наблюдения и даже помогли в программировании видеоигр.
До сих пор исследователям, занимающимся созданием роевых роботов, не удавалось воспроизвести все аспекты взаимодействия на основе феромонов, которые происходят в природе. Ученые применяли как химические средства, используя спирт, чтобы имитировать феромоны, так и физические методы, используя свет и звук, чтобы попытаться точно воспроизвести взаимодействие на основе феромона. Но ни один из этих подходов не был полностью эффективным.
Специалисты из Высшей школы информатики Университета Линкольна создали не имеющую аналогов искусственную систему феромонов, которая является надежной и точной, при этом использует только доступные компоненты.
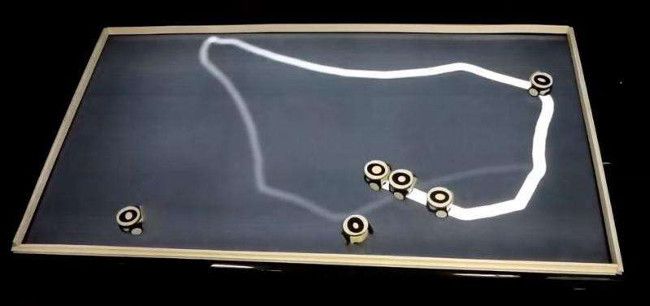
Используя ЖК экран и недорогую камеру USB, система позволяет пользователям моделировать несколько феромонов, отображаемых на экране в виде визуально заметных траекторий и меняющих свое воздействие, чтобы обеспечить контролируемые эксперименты. Изображение визуального «феромона» на экране воспринимается у роевых роботов двумя датчиками света, которые имитируют антенны муравьев.
Новая система называется COS-phi (Communication System via Pheromone) и состоит из недорогого микро-робота из стандартных компонентов и системы локализации с открытым исходным кодом, которая отслеживает траектории роботов и выделяет искусственный феромон.Под руководством кандидата наук Фаршада Арвина группа исследователей использовала открытую платформу Colias. Colias может быть использована для исследования коллективного поведения и может применяться для роевых приложений. Она создана в 2014 году в сотрудничестве со специалистами из Университета Цинхуа в Китае.
Используя систему COS-phi, исследователи обнаружили, что их микро-роботы могли следовать за лидером или распространителем феромона, без явного указания направления или связи между ними.
Успех системы означает, что теперь она может быть широко использована в проектах по исследованию биовдохновленных роев роботов, что открывает путь для дальнейших исследований в этой области. Команда из Высшей школы информатики Унивеситета Линкольна в настоящее время исследует влияние скорости диффузии феромонов и испарения на характеристики роя и поведение в более сложных условиях с препятствиями.
Комментарии
(0) Добавить комментарий