Роботы имеют большой набор достоинств, но деликатность традиционно в него не входит. Жесткие конечности и пальцы затрудняют для роботов захват, удержание и манипулирование рядом повседневных объектов, не гарантируют их от падения или повреждения.
Недавно исследователи из Массачусетского технологического института, работающие в Лаборатории искусственного интеллекта и информатики (CSAIL), обнаружили, что решение проблемы может быть связано с материалом, который чаще ассоциируется с новостройками, где он используется в качестве силиконового полимера.
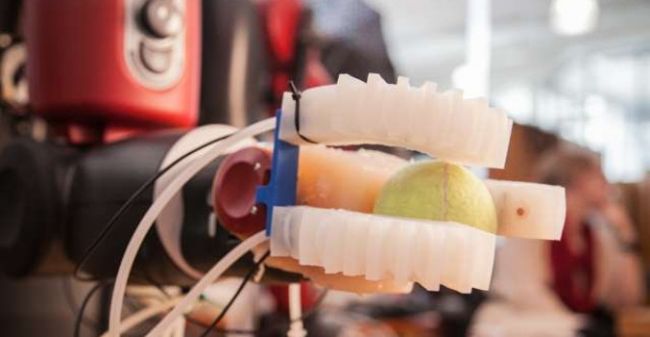
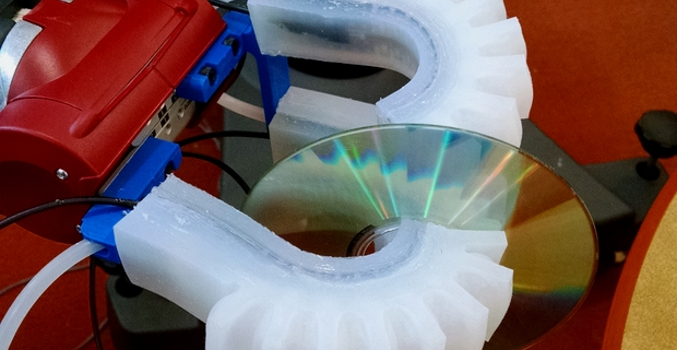
На прошедшей недавно конференции Даниэла Рус, руководитель исследования по распределенным роботизированным системам из CSAIL, продемонстрировала созданную методом 3D-печати руку для робота из силиконовой резины, которая может манипулировать такими хрупкими объектами, как яйцо, и такими тонкими, как компакт-диск.
Также впечатляет и то, что три больших пальца руки имеют специальные датчики, которые могут достаточно точно оценить размер и форму объекта, чтобы распознать его в наборе из нескольких элементов.
Механизм захвата, который может подбирать такие предметы, как теннисный мяч, кубик Рубика и шапочка ребенка, является частью более крупной конструкции, созданной в лаборатории под руководством Рус. Эта система предназначена для использования в так называемых «мягких роботах», создаваемых из таких нетрадиционных материалов, как силикон, бумага и волокна.
Когда мягкий робот лучше, чем жесткий
Исследователи считают, что мягкие роботы имеют ряд преимуществ по сравнению с «жесткими», в том числе позволяют манипулировать объектами неправильной формы, втискиваться в ограниченное пространство и противостоять столкновениям.
«Робот с «жесткими» руками будет иметь гораздо больше проблем в таких задачах, как собирание объектов. Это происходит потому, что в конструкцию робота должна быть заложена хорошая объектная модель, и он будет тратить много времени, «думая» о том, как именно выполнять захват».
Мягкие роботы представляются многообещающей альтернативой. Тем не менее, единственным недостатком их расширенной гибкости является то, что они часто имеют трудности точного отслеживания местонахождения объектов, даже если они успешно отсортированы.
Разработчики надеются, что в последующем, с дальнейшим совершенствованием датчиков, система сможет в конечном итоге различать десятки объектов и может быть запрограммирована для того, чтобы взаимодействовать с ними по-разному, в зависимости от их размера, формы и функции.
Как это работает
Исследователи могут контролировать захваты через несколько поршней, которые нагнетают сжатый воздух в силиконовые пальцы. Поршни продавливают пузырьки воздуха в пальцы, вызывая сжатие и разжимание. Рука может использовать сцепление двух типов: «обволакивающая хватка», где объект полностью находится в захвате, и «зажимающая хватка», когда объект удерживается кончиками пальцев.
Использование этого манипулятора для оснащения популярного промышленного робота Baxter выявило его серьезные преимущества в сравнении со стандартным захватом робота, который не смог подобрать CD или лист бумаги и зачастую полностью сминал такие предметы, как алюминиевые банки из под напитков.
В последующем планируется уделять больше времени совершенствованию и добавлению датчиков, которые позволят захватам идентифицировать более широкий круг объектов. «Наша мечта – разработать робота, который, как человек, может подойти к неизвестному объекту, определить его примерный размер и форму и выяснить, как взаимодействовать с ним».
Комментарии
(0) Добавить комментарий