В последние годы нас удивляют новые технологии, позволяющие роботам и людям двигаться быстрее и прыгать выше. Мягкие, эластичные материалы сохраняют энергию в устройствах, которые способны на элегантные движения после точного высвобождения запасов энергии.
Роботы перепрыгивают через препятствия, а люди на протезах выигрывают спринтерские забеги. При разработке этих технологий имеется одна фундаментальная проблема. Ученые тратят долгие часы на создание и тестирование прототипов, которые смогут надежно перемещаться особыми способами.
Два новых вычислительных метода, разработанных группой исследователей из Массачусетского технологического института, Университета Торонто и Adobe Research, позволяют сделать первые шаги в направлении автоматизации этих движений. Эти методы моделируют реальное поведение гибких устройств со скоростью в 70 раз быстрее, чем ранее, и обеспечивают серьезное повышение точности имитируемых столкновений и подскоков. Благодаря этому они подходят для проектирования при создании динамических механизмов контролируемого прыжка.
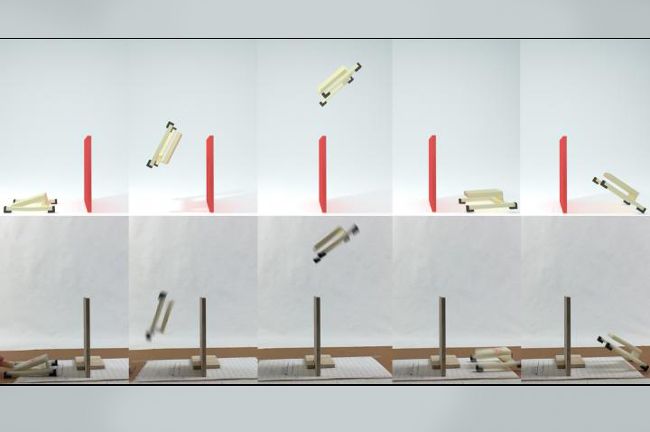
Исследователи демонстрировали свои новые методы, Dynamics-Aware Coarsening (DAC) и Boundary Balanced Impact (BBI), разрабатывая и создавая механизмы, которые переворачиваются, бросают и прыгают через препятствия.
Команда черпала вдохновение в осознании потребности в более быстрых и более точных инструментах проектирования, которые могут фиксировать точное моделирование упругих объектов, подвергающихся деформации и столкновениям, особенно на высоких скоростях. Эти новые методы в будущем могут применяться в робототехнике, поскольку роботы все чаще используют человекоподобные движения и характеристики.
Комментарии
(0) Добавить комментарий