Как известно, кошка всегда приземляется на ноги. Карен Лю надеется, что в будущем, то же самое можно будет сказать и про роботов.
Чтобы понять, каким образом врожденные способности животных из семейства кошачьих или поведение человека во время падений может быть применимо к падающим роботам, Лю, доцент в Школе интерактивных вычислительных систем в Джорджии, изучала физические процессы с падающими кошками и ориентирующимися в пространстве спортсменами и космонавтами.
В докладе, представленном на международной конференции по Интеллектуальным роботы и системам (IROS), Лю поделилась результатами исследований по ориентации и поведению кошек и людей в свободном падении и в момент приземления. Это поможет снизить негативное воздействие падения для роботов, особенно тех, которые в будущем могут быть использованы для поисково-спасательных операций в опасных условиях.
Мало того, что Лю и ее коллектив исследователей из университета Джорджии имитировали падения, а также изучали последствия приземлений.
"Страшны не последствия падения. А его внезапная остановка в конце", - сказала Лю. "Один из самых важных факторов, определяющих урон от падения – угол приземления".
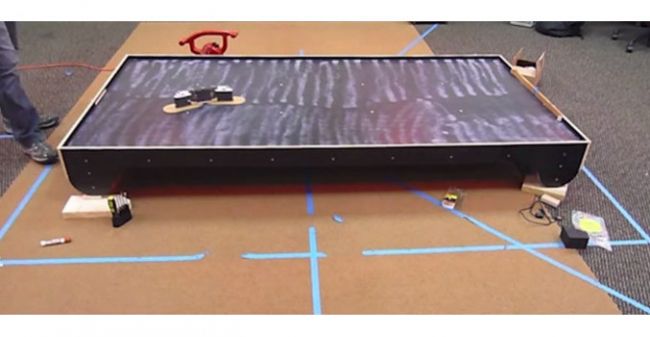
В экспериментах использовался небольшой прототип робота, состоящий из корпуса и двух симметричных ног. Тот факт, что робот не может двигаться достаточно быстро, компенсировался в лабораторных условиях за счет создания пониженной тяжести с использованием наклонной поверхности, аналогичной столу для воздушного хоккея, оснащенного воздуходувкой. Лю вместе с коллегами моделировали элементы длительного падения и изучили возможности создания "мягкой наклонной" посадки для снижения воздействия удара, способного повредить робота.
В проведенной работе, исследователи обнаружили, что правильно спроектированный робот имеет "мозг" для вычисления необходимой для наиболее мягкого приземления траектории, но современные двигателя и серво-технологии не позволяют реализовать достаточно быстрый аппаратный механизм, способный имитировать кошачьи рефлексы. Перспективные исследования направлены на дальнейшее усовершенствование мастерства роботов в ориентации и падении, то, чему люди могут обучиться, а для кошек это вообще естественно.
"Самое главное в том, что человеческий мозг не может достаточно быстро вычислить и определить оптимальную последовательность положений тела в процессе падения, которые обеспечат безопасное приземление", - отмечают исследователи.
"Теоретически, независимо от того, какова у нас начальная позиция и начальная скорость, мы не можем точно контролировать угол падения, изменяя положение тела в воздухе", говорит Уэда Вудрафф, доцент школы машиностроения. "В действительности у нас есть много ограничений, как пределы перемещения суставов или мышечной силы, которые не позволяют нам достаточно быстро изменять положение тела".
"Если мы верим, что, в конце концов, научимся делать весьма динамично перемещающихся роботов, мы также должны научить их правильно падать, безопасно приземляться после прыжка или падения с высоты", - говорит Лю.
Комментарии
(0) Добавить комментарий