Насколько бы «умными» не были роботы, но отсутствие самосознания является одной из ключевых особенностей, которая отличает их от людей. Недавно исследователи из Колумбийского университета занялись этой проблемой и создали для робота-манипулятора элементарную форму самосознания, что позволит ему лучше адаптироваться к изменяющимся внешним условиям.
Большинство роботов предназначены для конкретной работы, и чтобы они могли выполнять ее наилучшим образом, люди программируют их на «самосимуляцию», которая позволяет им понять, когда и какие движения они могут выполнять. Этот вид «ограниченного ИИ» хорошо работает в предназначенных для робота условиях, но если эти условия меняются или робот повреждается, он может и не знать, как ему следует адаптироваться.
С другой стороны, люди в течение всей своей жизни развивают и приспосабливают к разным условиям собственное представление о себе. Как правило, вы знаете, на что способно ваше тело. Вы понимаете, например, что ваши локти сгибаются в одном направлении, и вы знаете диапазон доступных движений. Если эти возможности меняются из-за травм или просто по мере старения, вашему мозгу не слишком сложно приспособиться к новым условиям.
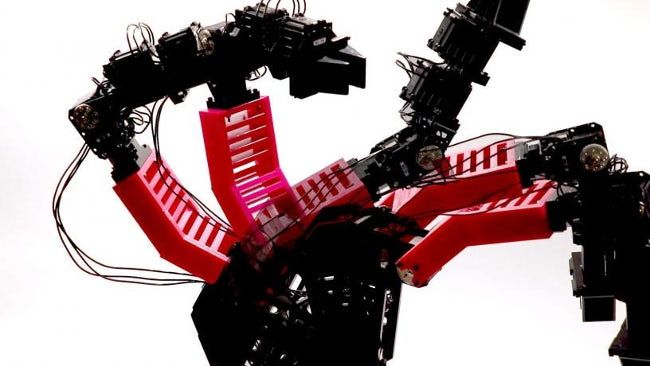
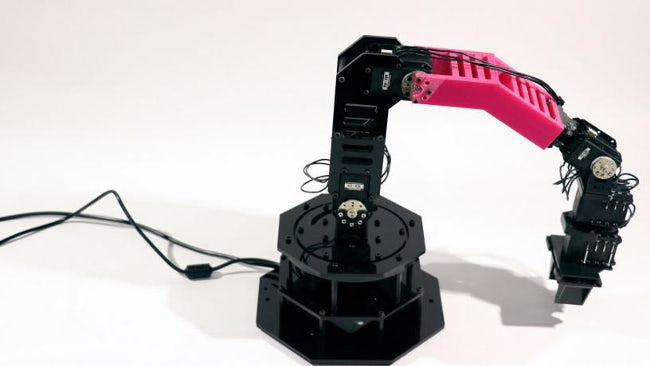
Исследователи из Колумбийского университета попытались создать подобный тип самосознания для робота. Они начали с шарнирного манипулятора, который имел четыре степени свободы, и вместо того, чтобы придать ему заранее сформированную модель, они позволили ему построить свою собственную, используя методы глубокого обучения.
Вначале робот не имел ни малейшего представления, какой он был формы, и случайно вращался в пространстве. Но эти случайные движения были важным первым шагом, позволившим ему собрать около 1000 траекторий, каждая из которых содержала по 100 точек. На этом основании робот смог использовать глубокое обучение, чтобы построить свою собственную модель и отрегулировать ее в процессе исследования. Команда отмечает, что первые самодостаточные модели были далеки от совершенства, но после обучения в течение приблизительно 35 часов, их точность оказалась в пределах 4 см относительно специализированного робота.
Чтобы проверить усвоенные способности, манипулятор робота заставили выполнять основную его задачу: «выбрать и разместить», позволяя роботу перекалибровать свое положение на каждом этапе движения. Он смог подобрать набор объектов и поместить их в контейнер со 100 % успехом, падающим до 44 % без перекалибровки. Но это все равно впечатляет, сравнивая с человеком, который делает эту работу с закрытыми глазами.
Следующим шагом было проверить, насколько хорошо робот может адаптироваться к новым обстоятельствам. Исследователи напечатали на 3D-принтере и установили новую деталь, которая изменила форму руки. Конечно же, роботу не потребовалось много времени, чтобы понять, что его собственная модель устарела, и он смог обновить себя и продолжить свою работу.
Хотя это далеко не так, как у людей и других животных, исследователи говорят, что это похоже на то, как младенцы учатся на ранних стадиях двигательных навыков. В конце концов, дети все еще развивают самосознание, и эти случайные удары и толчки позволяют им понять, как работают их собственные тела.
Комментарии
(0) Добавить комментарий