Если робот отправлен обезвредить придорожную мину или осторожно управляется с яйцом в процессе приготовления омлета, он должен уметь ощущать, когда объекты выскальзывают из его рук.
Но до настоящего времени большинство роботизированных и протезированных рук былине способны точно определить вибрации и усилие скольжения, которые появляются, например, когда палец скользит вдоль стола или когда объект начинает падать.
Недавно инженеры из Университетов Вашингтона и Калифорнии разработали гибкую чувствительную «кожу», которая может быть натянута на любую часть тела робота или протеза, чтобы точно передавать информацию о сдвиговых усилиях и вибрации, которые имеют решающее значение для успешного захвата и манипулирования объектами.
Биоиндуцированная кожа датчика робота имитирует то, как человеческий палец испытывает напряжение и сжатие, когда он скользит по поверхности или распознает текстуру. Она измеряет эту тактильную информацию с такой же точностью и чувствительностью, как и кожа человека, и может значительно усовершенствовать способность роботов выполнять различные действия, от хирургических и промышленных процедур до очистки кухни.
«Роботизированные и протезируемые конечности действительно основаны на непосредственных визуальных подсказках, например, «могу ли я увидеть, как моя рука охватывает этот объект?» или «она касается этого провода?». Но это, очевидно, неполная информация», - сказал один из авторов проекта Джонатан Познер, профессор механического и химического машиностроения.
Если робот собирается демонтировать самодельное взрывное устройство, ему нужно знать, проскользнет ли его рукав вдоль провода или потянет его. Чтобы держать медицинский инструмент, он должен знать, насколько скользкая у него ручка. Для этого требуется способность ощущать усилие сдвига, что было пока недоступно для чувствительной кожи, сказал Познер.
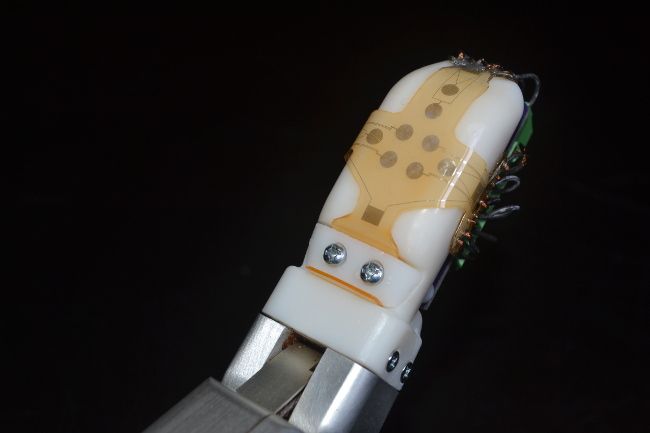
Новая эластичная электронная кожа изготовлена из такого же силиконового каучука, который используется в очках для плавания. Каучук снабжен крошечными серпантинными каналами примерно в два раза тоньше человеческого волоса, заполненными электропроводящим жидким металлом, который не будет трескаться при растяжении кожи, как твердые провода.
Когда кожа оборачивается вокруг пальца робота, эти микрожидкостные каналы стратегически расположены по обе стороны от того места, где у человека ноготь.
Когда изменяется геометрия канала, увеличивается количество электроэнергии, которая может протекать через них. Ее можно измерить и соотнести с силами сдвига и вибрациями, которые испытывает палец робота.
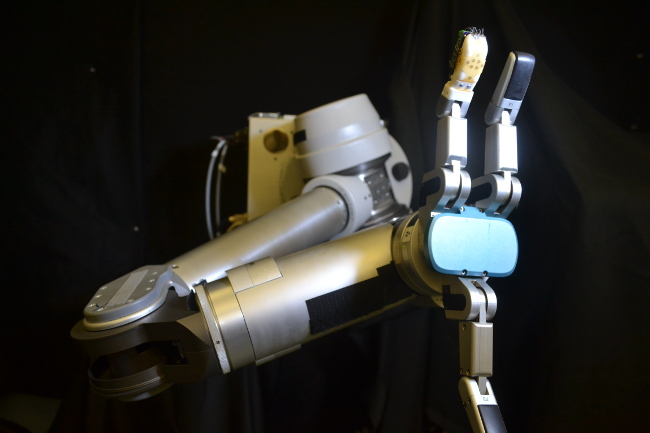
Исследователи продемонстрировали, что физически прочная и химически стойкая сенсорная оболочка обладает высокой степенью точности и чувствительности при легком касании, открывая дверь, удерживая телефон, при рукопожатии, сборе пакетов, обработке объектов и т. д.
Недавние эксперименты показали, что кожа может обнаруживать крошечные вибрации со скоростью 800 раз в секунду. Это превышает способности человеческих пальцев.
«Подражая физиологии человека в гибкой электронной оболочке кожи, мы достигли уровня чувствительности и точности, соответствующих человеческим рукам, что является важным прорывом», - сказал Познер.
Комментарии
(0) Добавить комментарий