Подобно человеку и большинству наземных животных, двуногим роботам нужно уметь перемещаться по пересеченной местности, чтобы быть полезными в ликвидации последствий стихийных бедствий и в поисково-спасательных работах.
Однако разработка алгоритмов управления, которые могут обрабатывать отдельные опоры для стопы (например, щебень или ступеньки) является трудновыполнимой задачей, потому что существуют строгие ограничения на размещение стопы, которые не могут быть нарушены, и движение этих систем регулируется сложными динамическими уравнениями.
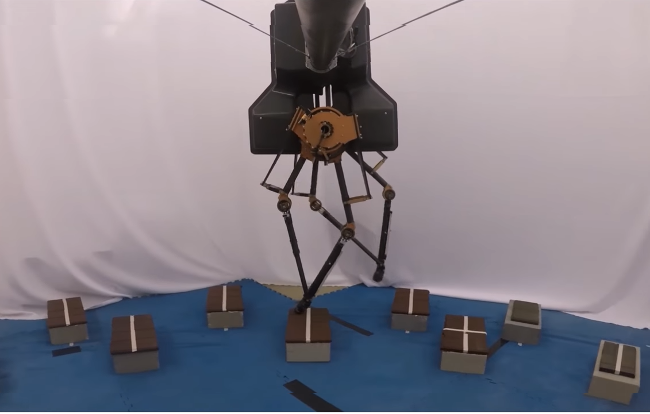
Благодаря использованию последних достижений в области оптимальных и нелинейных систем управления сотрудникам лабораторий Калифорнийского университета в Беркли и Университета Карнеги-Меллона удалось решить похожую задачу, применяя динамические движения. Они научили двуногого робота ATRIAS динамической ходьбе по камням, когда расстояние между ними, а также высота варьируются случайным образом.
Во время тестовых испытаний на пути робота были выложены камни, при этом расстояние между ними менялось от 30 до 65 сантиметров, а высота составляла от 12 до 38 сантиметров. В разработанной системе не используются данные с камеры, вместо этого после каждого шага робота алгоритм получает данные о местоположении следующего препятствия.
Роботы с ногами являются гораздо более универсальными, чем их колесные аналоги, которым тяжело ориентироваться в узких лабиринтах или при значительных перепадах по высоте. Способности двуногих роботов перемещаться по пересеченной местности с непредсказуемым ландшафтом делает их идеальными кандидатами для применения в сложных условиях.
Хотя на протяжении многих лет двуногие роботы были серьезно усовершенствованы в плане механической конструкции и стратегии управления, но они все еще далеки от использования в реальных условиях. Современные роботы все еще медлительны и статичны в движении, не устойчивы в неожиданных ситуациях и неэффективны с точки зрения использования энергии.
В группе гибридной робототехники Калифорнийского университета занимаются разработкой формальных систем контроля для двуногого робота, которая не только гарантирует точность постановки ноги на неопределенной местности, но и надежные модели внешних сил. Эти методы не зависят от конкретного робота и были протестированы на разных, включая RABBIT, ATRIAS и DURUS.
Комментарии
(0) Добавить комментарий