Конструкция обычной руки робота представляет собой более или менее механизированный вариант человеческой руки с локтевыми и лучезапястными суставами. Такие конструкции, как правило, оказываются неуклюжими в стесненных условиях и не подходят для большинства промышленных процессов на производственной линии.
Альтернативой становится дельта манипулятор – серия взаимосвязанных параллелограммов, которые ограничены в перемещении по X, Y или Z и не вращаются.
Такой тип роботизированной руки популярен для использования в труднодоступных рабочих областях. Но, когда роботы сталкиваются с такими требованиями как мобильность и компактность, требуется конструкция, которая включает в себя лучшие особенности обоих типов манипуляторов. Здесь на выручку приходит двойной дельта манипулятор.
Стандартный дельта манипулятор был изобретен в начале 1980-х годов Реймондом Клавелем (Reymond Clavel). Когда Aad van der Geest, независимый разработчик программного обеспечения и электромеханических устройств, впервые познакомился с конструкцией дельта робота, то был от нее в восторге. Однако, когда он попытался использовать конструкцию в практической ситуации, то мгновенно отметил один серьезный недостаток: робот способен работать только в очень ограниченном пространстве.
Традиционные роботизированные манипуляторы, подобные тем, что используются на производственных конвейерах, состоят из тяжелых компонентов и отличаются инерционностью, но они также обладают мощностью и гибкостью. Van der Geest задумал усовершенствовать оригинальную, легкую конструкцию дельта робота с параллельными связями. Чтобы можно было успешно использовать его в приложениях, требующих традиционных роботизированных манипуляторов, но без их большого веса и инерции.
Суть его замысла, как и многих других инновационных идей, оказалась простой. Нужно соединить несколько дельта манипуляторов, но оставив прикрепленные к основанию прочные и надежные управляющие и исполнительные механизмы.
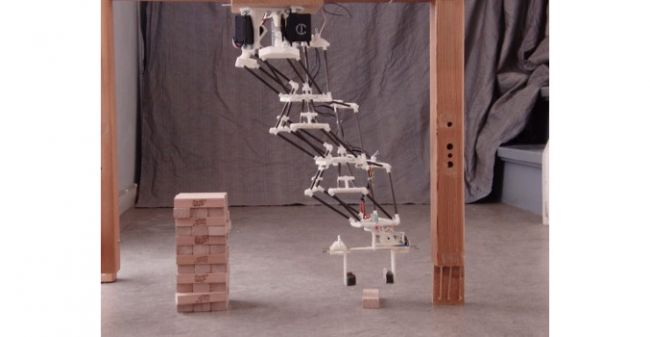
Чтобы добиться этого, база робота (в комплекте со всеми разгибателями и управляющими приводами) первоначально монтируется над рабочей зоной. С этой базы управляются три соединяемых в форме треугольника элемента. Несколько таких конструктивных модулей соединяется в цепочку для достижения требуемой длины. Приведение в действие каждого из звеньев в цепочке будет перемещать треугольные секции в направлениях X, Y или Z (вверх или вниз, вдоль или поперек).
Вся конструкция управляется из одной точки базы, манипуляторы могут быть изготовлены из легких или композитных материалов. В результате, перемещаемые элементы дельта робота оказываются мало инерционными, что позволяет обеспечить очень высокую скорость перемещения и такое же быстрое ускорение.
Вся конструкция с соединенными элементами и конечными захватами отличается повышенной жесткостью и прочностью при незначительном весе, работая при этом в ограниченном пространстве, именно к этому и стремился Van der Geest. Он изготовил три работающих опытных экземпляра, чтобы доказать работоспособность своей идеи. Маленький манипулятор имеет размеры всего в 150 мм, в то время как самый большой 3,5 метра в высоту.
Хотя дельта роботы в основном используют поворотные приводы, Van der Geest недавно экспериментировал также с вертикальными линейными приводами в возвратно-поступательной дельта конструкции, чтобы создать новый тип 3D принтера. По словам изобретателя, они обещают возможность создания больших конструкций, сопоставимых по стоимости разработки и массового изготовления с обычными 3D принтерами.
Комментарии
(0) Добавить комментарий